Nach einer Überdosis Programmierarbeit hab ich mich dazu entschlossen die Arbeiten am Freund und Parnet von R2 zu starten.
Das war natürlich schon immer ein Herzenswunsch, R2 nicht alleine da stehen zu lassen. Nach langen Vorrecherchen bin ich dann auch auf die STL Files des Goldjungen gestossen. Sie sollen von einem 3D Scan einer Statue von den Don Post Studios gefertigt worden sein.
Als erstes musste ich die Teile natürlich druckergerecht zerteilen.
Die Füsse sind gedruckt

Den Kopf hatte ich ja schon. Ober den zum Rest passt wird sich zeigen. Ansonsten werde ich ihn neu ausdrucken. Auf jeden Fall eignet er sich hervorragend als Testobjekt für die Vergoldung. Mit Kunst Blatt Gold überzogen sieht er schon sehr gut aus.

Der Druck der Beine geht voran.

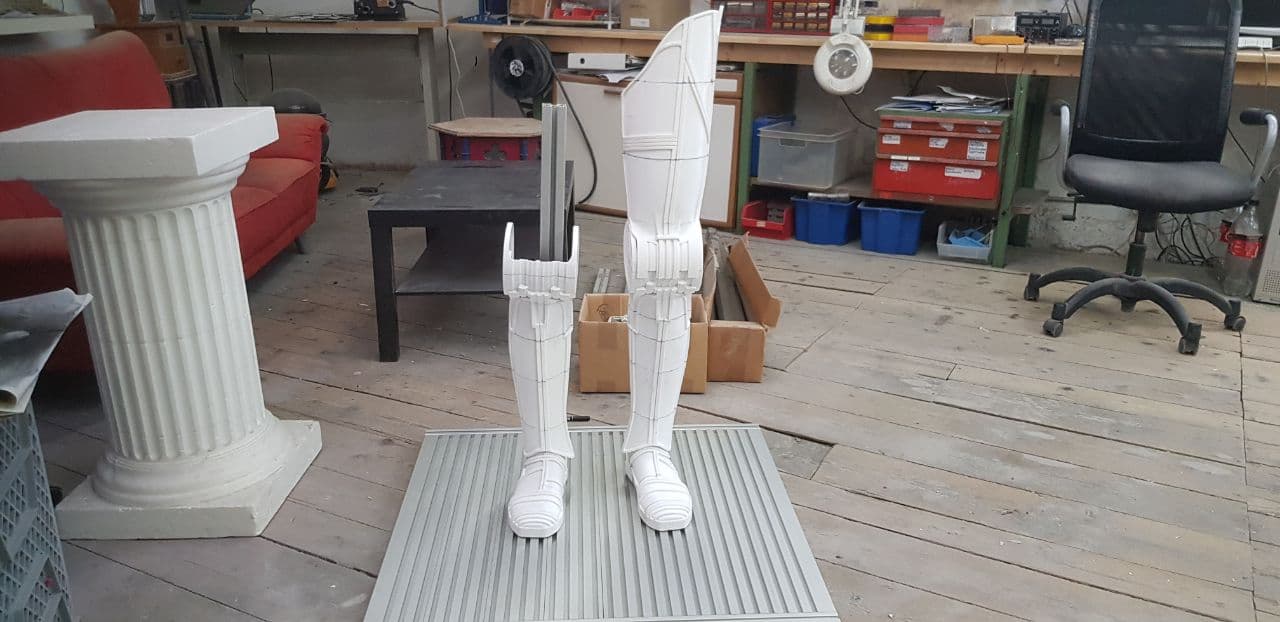
Wow die Shorts sind gedruckt
Aus vielen kleinen Teilen ist nun die Hose fertig gedruckt und zusammengeklebt.

Autsch!
Ist schon lange nicht mehr passiert.
Oberkörper
Weiter geht es mit dem 3D Druck.


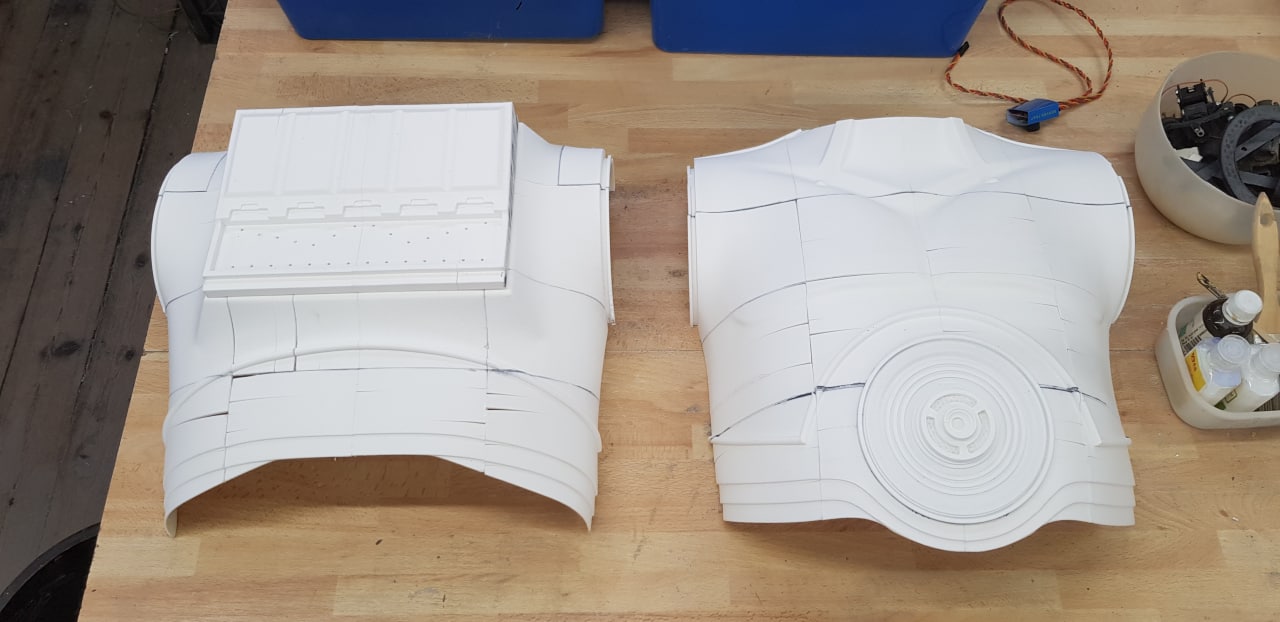
Alles gedruckt
Alle Teile sind nun gedruckt. Jetzt geht es ans Schleifen und Spachteln. Schlaf gut mein Freund.

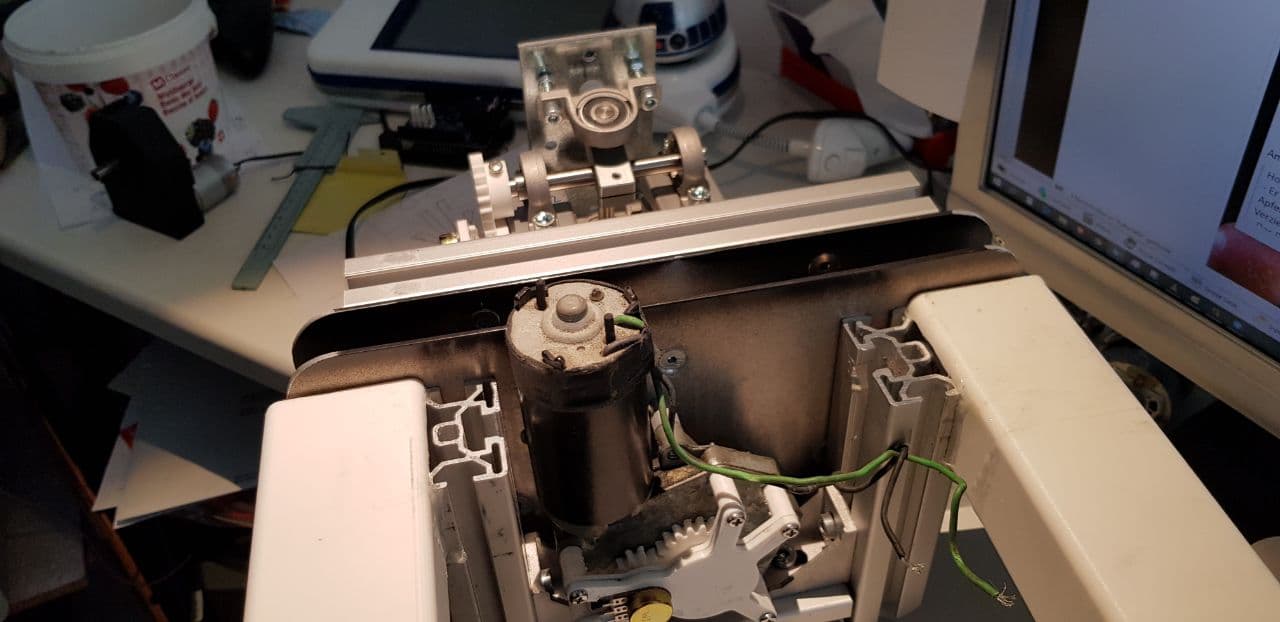
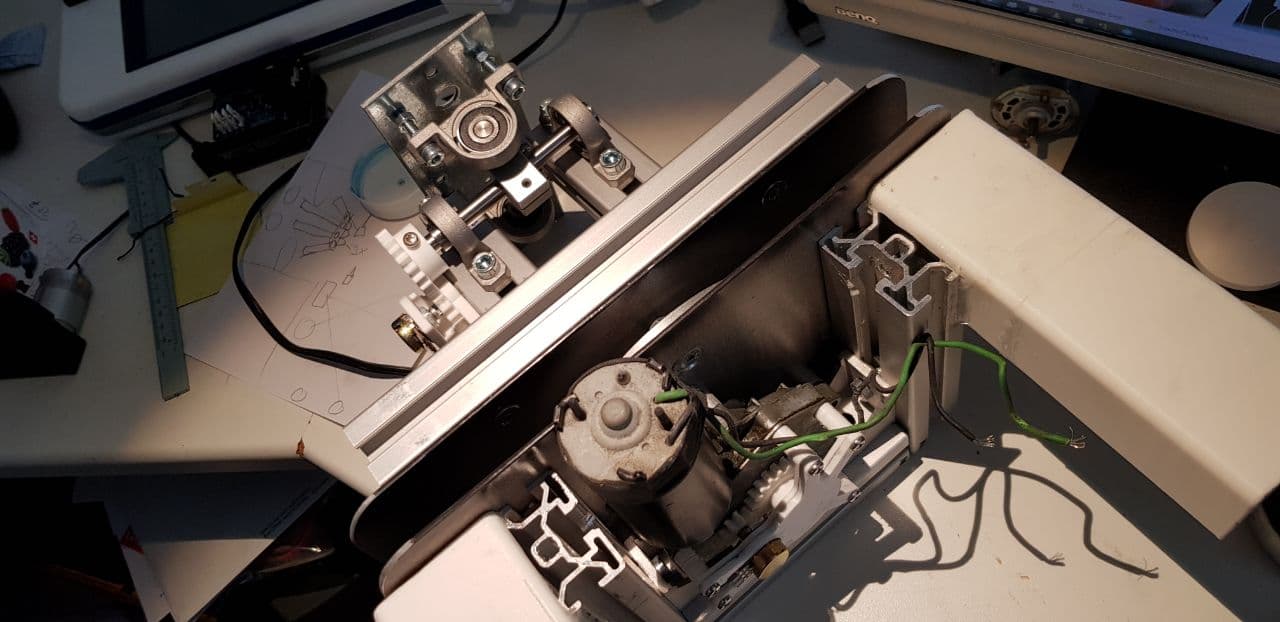
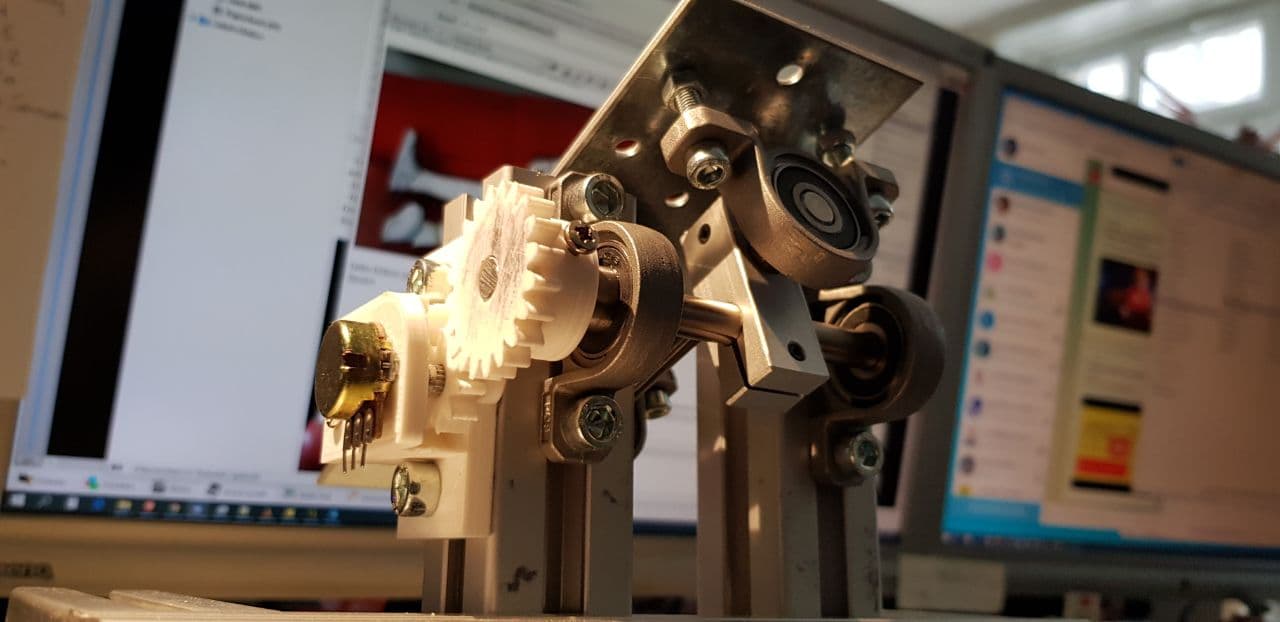
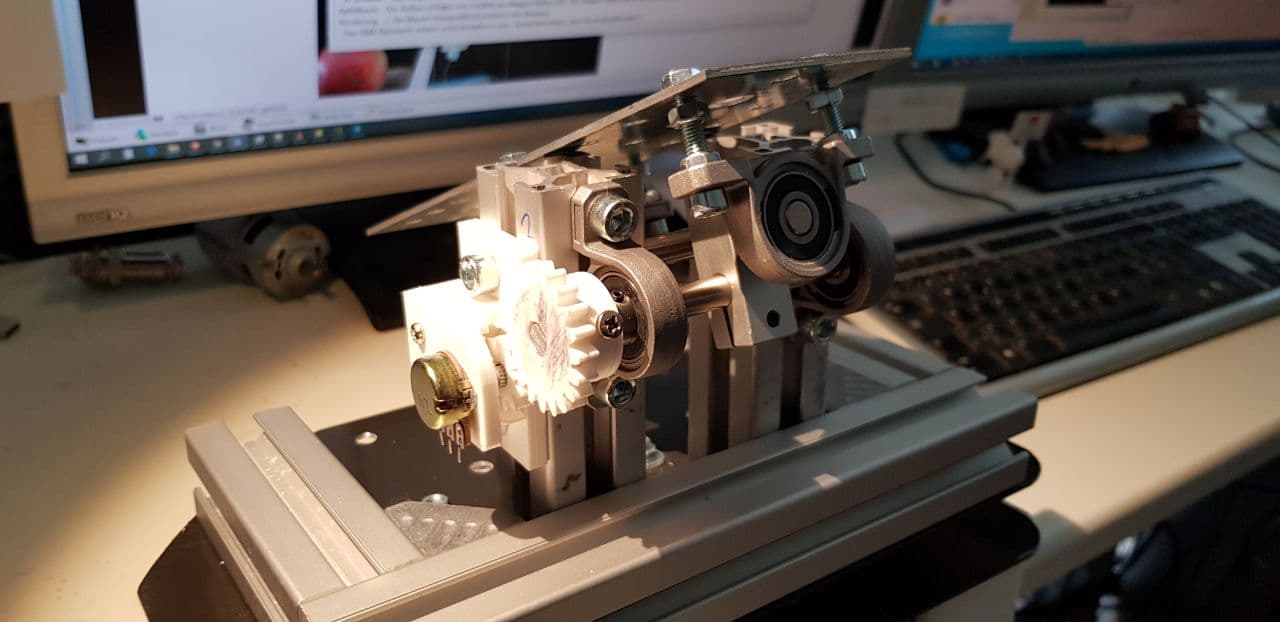
Mechanik V1.0 der Hüfte
C-3PO soll sich ja ab der Hüfte aufwärts bewegen können. Das erfordert eine Mechanik die stark ist den oberen Bereich der Figur zu bewegen. Scheibenwischer Motoren die noch am Lager sind erachte ich als geeignet dafür. Damit die Elektronik die genaue Position ermitteln kann, werden Potentiometer an den beweglichen Teilen über ein kleines Getriebe eingebaut.
Torso
Der Torso sitzt schon mal ganz gut auf den Beinen.

Neubeginn
Nach einer langen Pause bin ich über einen Beitrag gestolpert der mich aus den Socken gehaut hat. Eine Mechanik für C-3PO der genau meinen Anforderungen entspricht.
So habe ich mich auf den langen Weg gemacht und diesem Projekt alle Prioritäten eingeräumt.
Schlussendlich war wieder mal wie üblich aufwändiger als gedacht. Es werden 11 RC Servos benötigt. Wobei einige bei 80Kg Hebegewicht sehr Leistungsstark Und auch nicht günstig sind. Leider hat Aliexpress 8 Servos falsch geliefert. Die Rückgabe war so unfreundlich dass ich mich entschieden habe sie für mögliche weitere Projekt zu behalten.
Bau der Mechanik V 2.0
Da mein alter 3D Drucker so ungenau ist hatte der Unterbau schlussendlich nicht gepasst und ich musste es mit meinem neuen Bambu Lab Drucker noch einmal neue ausdrucken. Danach hat es gepasst.







Die Elektronik
Der Konstrukteur der Mechanik empfahl 4 ESP 32. Das für für mich von Anfang an komisch. Nach einigen Tests habe ich mich für einen ESP 32 entschieden. Ich habe mit dem Bau des Pit Droiden. einen ersten Test mit 5 Servos gemacht. Das klappt wunderbar und muss nun mir 22 Servos genau so gut funktionieren. Dafür verwende ich zwei PCA 9685 16 Kanal PWM Module. Die I2C Adresse muss auf dem Zweiten via Lötbrücke definiert werden.


Ja ich weiss für die LEDs werde ich dann schon ein anders Layout mit 3 LEDs verwenden. Ich habe dazu eine eigene Konstruktion gebaut.
Den Code lass ich mir in der Zwischenzeit mit ChatGPT 5.4 generieren. Das klappt eigentlich schon ganz gut.
Fortsetzung folgt...