Waaaaaaall-EEEEEE!!!
Das Projekt Wall-E hat schon 2008 begonnen als der Bruder meines Götti Meiteli mit den Überresten eines Spielzeugbaggers vorbeigekommen ist. Er war damals 6 Jahre alt. Er wollte so gerne mit mir einen Roboter bauen.
Ich wollte das ja auch schon lange mal und hatte schon einige Bauteile gesammelt die ich im richtigen Projekt einbauen wollte. Und so bauten wir dann zusammen dieses Vehikel.
Gesteuert über eine RC Fernbedienung. Das Highlight war die Videoübertragung die ich von Interdiscount für 49 Franken gekauft hatte. Die Kamera konnte man über einen Servo seitlich schwenken.

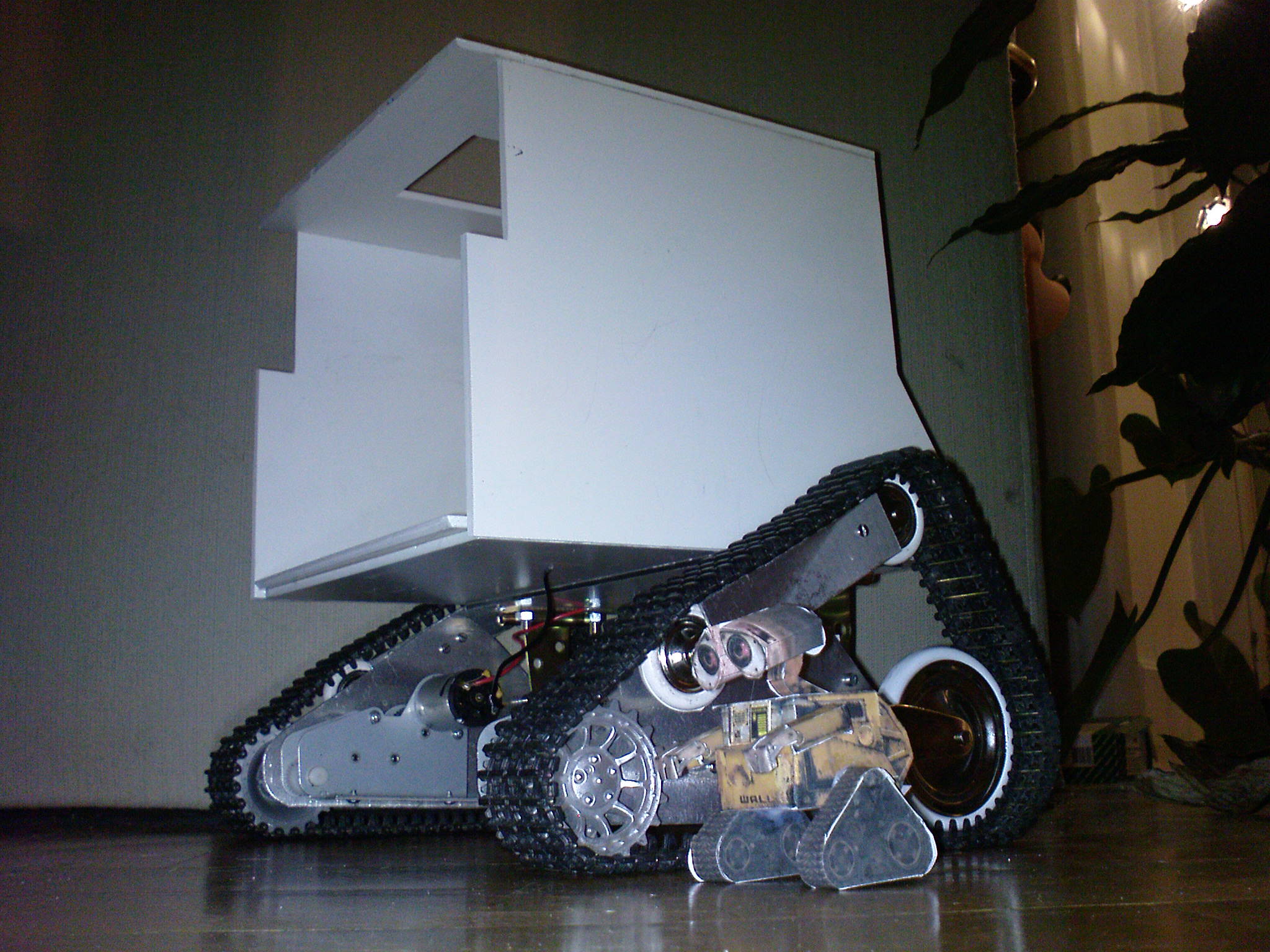
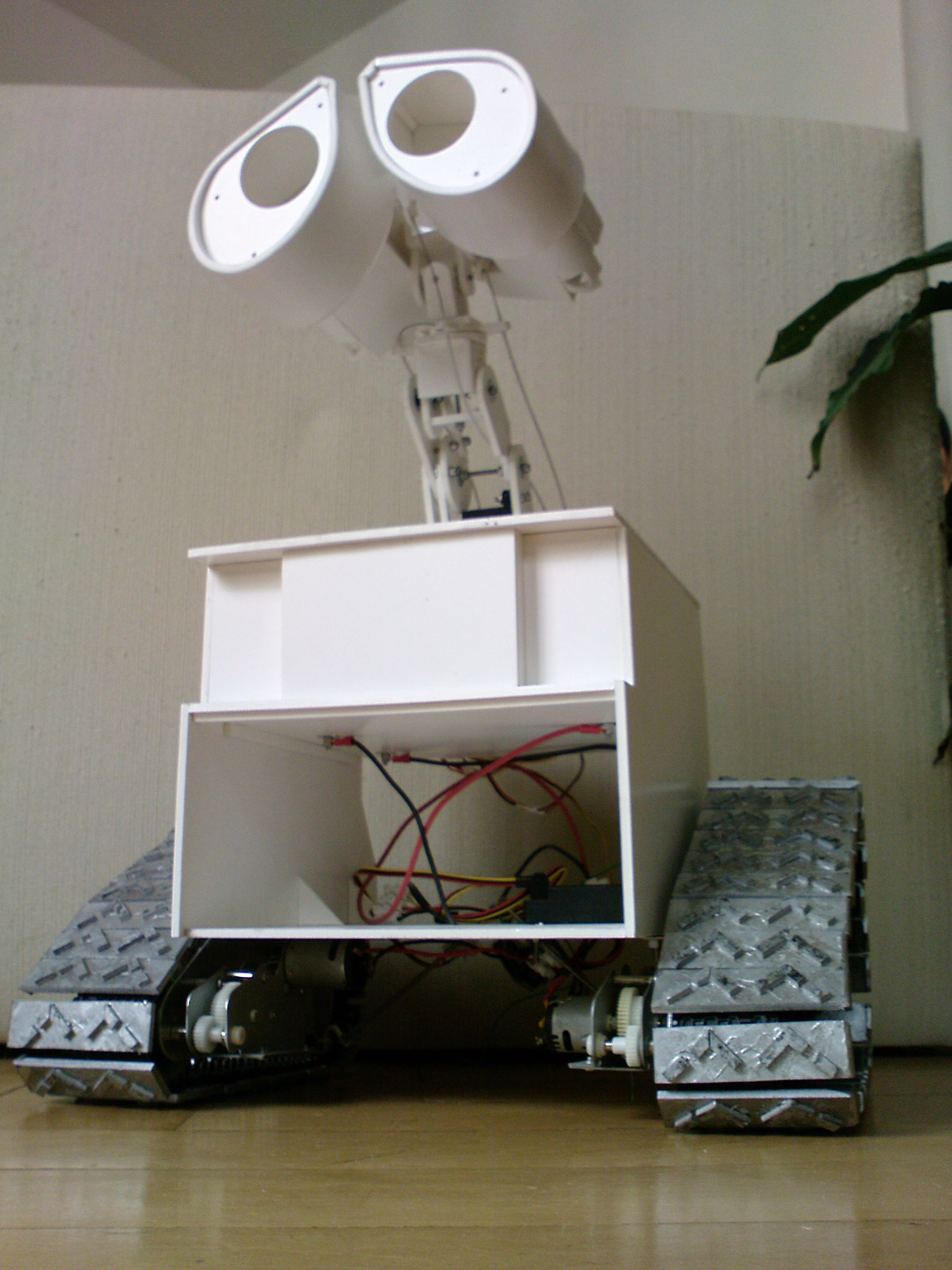
Er hatte noch das Fahrwerk eines RC Panzers der nicht mehr richtig funktionierte und wollte, weil er so Freude am Bauen hatte, mir die schenken. Wir entschieden uns endgültig dafür einen Wall-E zu bauen. Und so entstand die Grundform des süssen Roboters. Die Abmessungen des Körpers sind 20x20 cm. Der Aufbau ist mit Forex und Spezialkleber umgesetzt.
Leider hat mein junger Bastelfreud schnell die Motivation verloren als er merkte, dass da viel Arbeit drin steckt. Das hat mich nicht aufgehalten das Projekt weiter voran zu treiben.

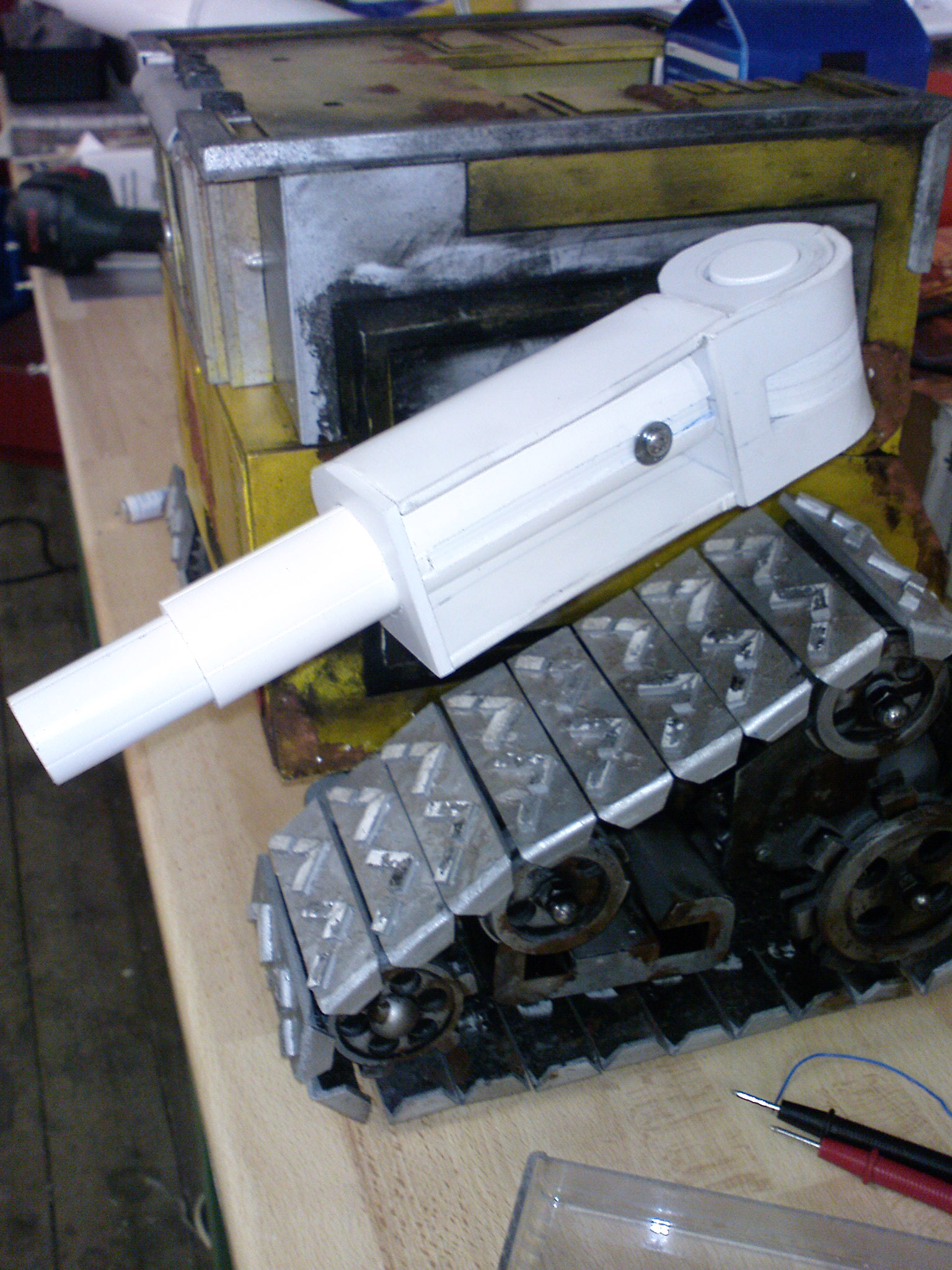
Aber die Raupen... Die gehen ja gar nicht.
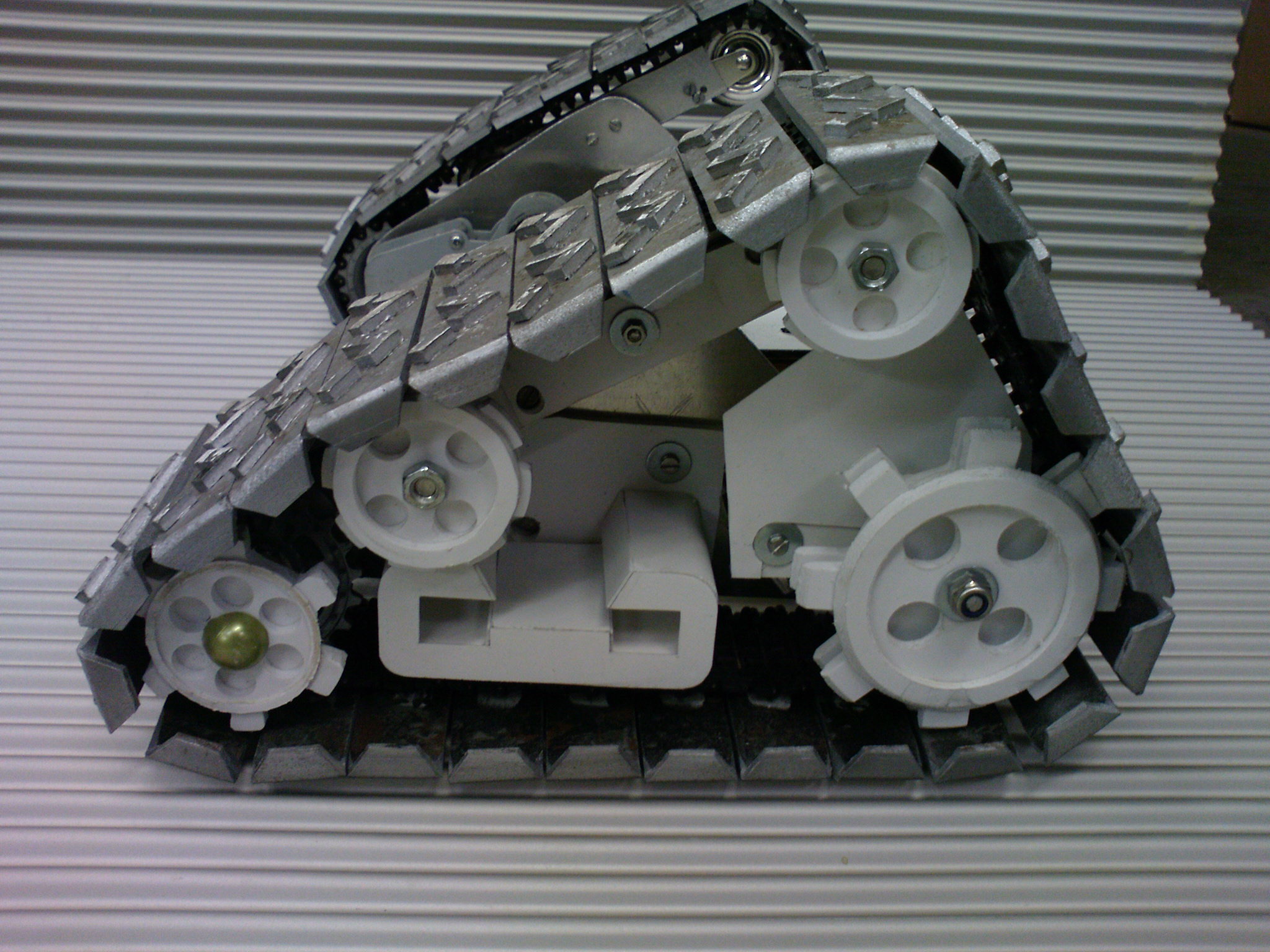
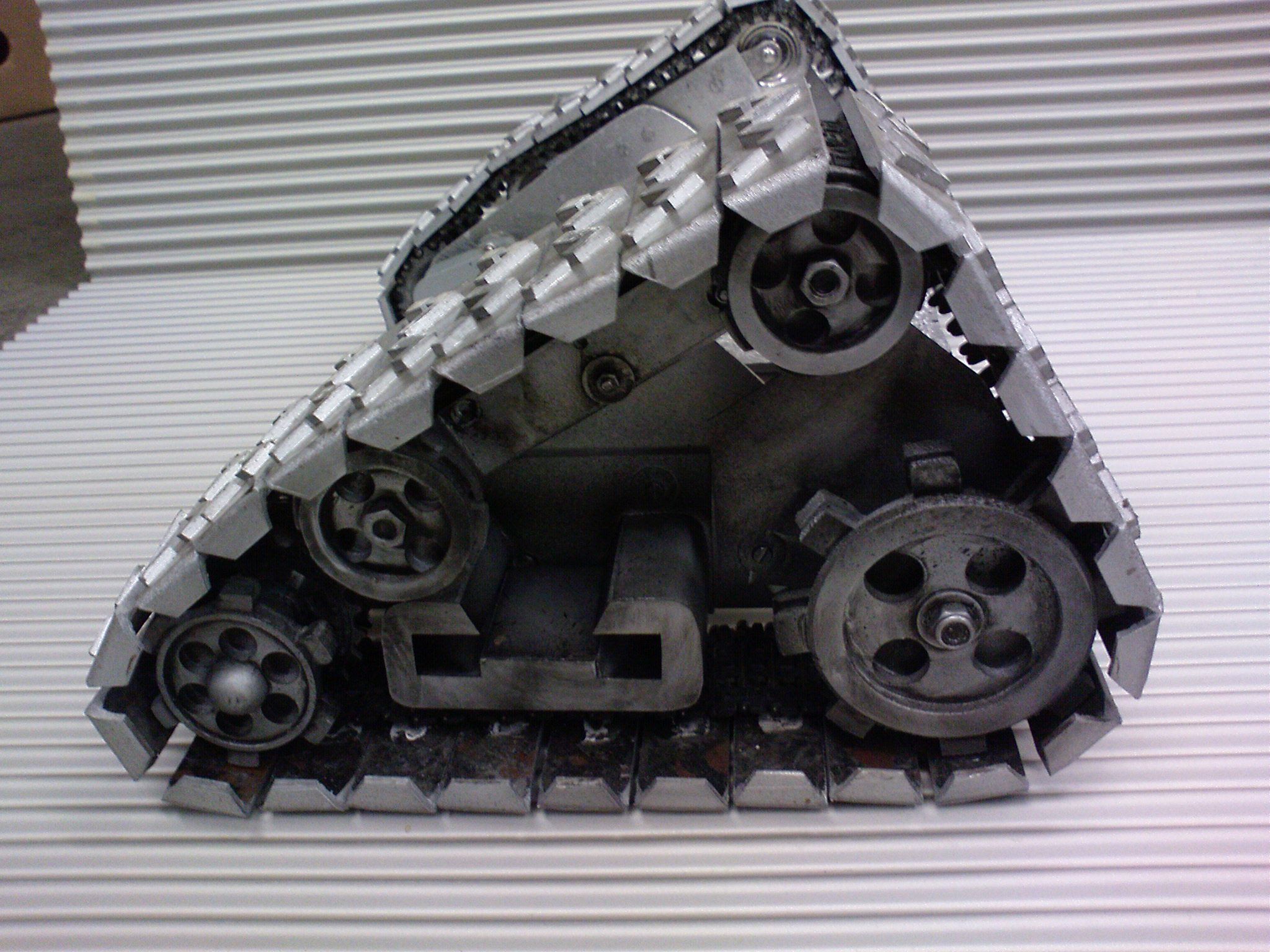
Wieder aus Forex und viel Zeit entstanden so viel kleine Kettenglieder die ich auf die alten Raupen aufgeklebt hab. Die billigen Räder hab ich mit coolen Blenden verdeckt. Ein bisschen Silber und eine optische Alterung und schon sieht es aus wie Metall.
Ja, die kann man jetzt anschauen 🙂
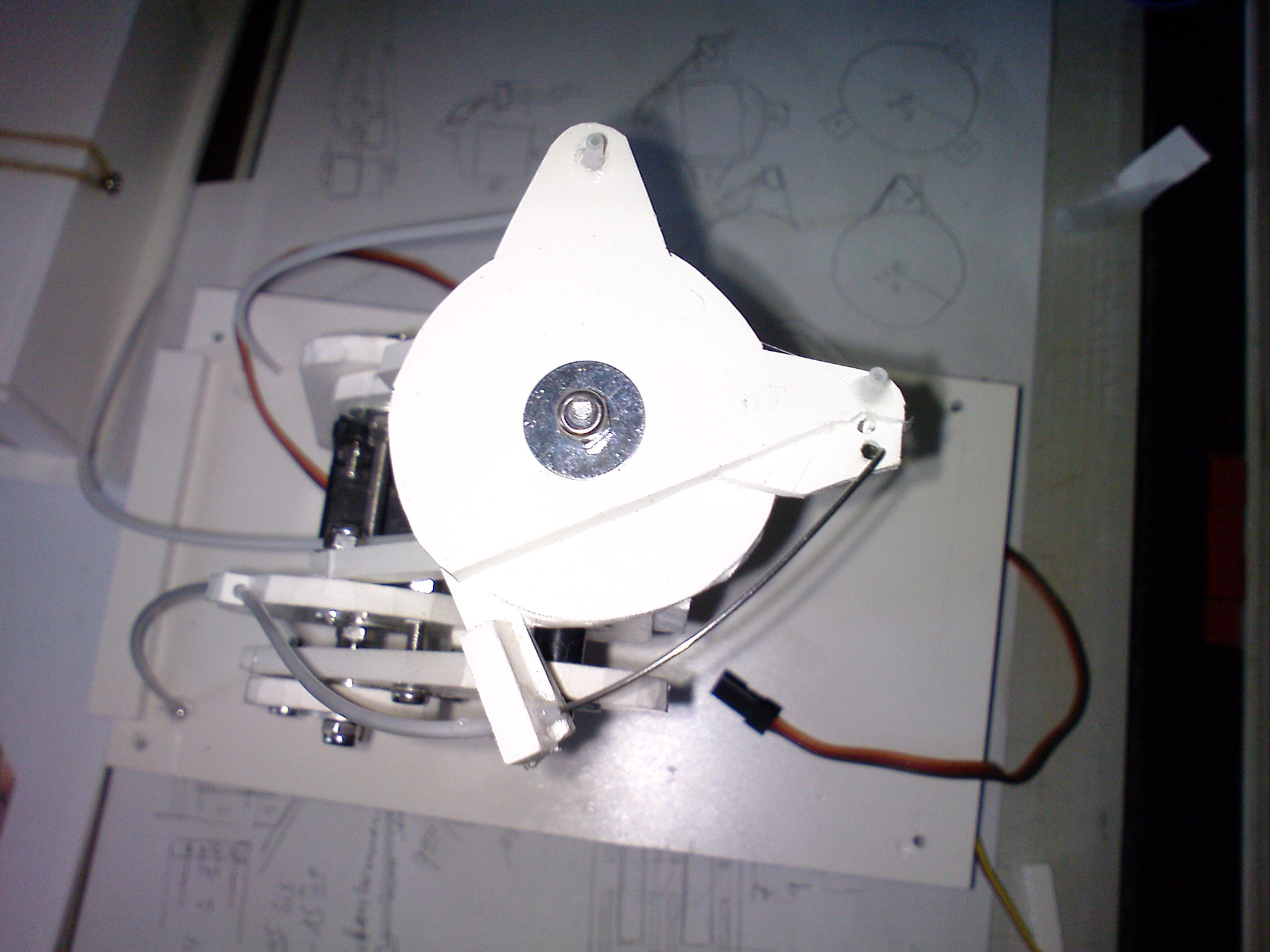
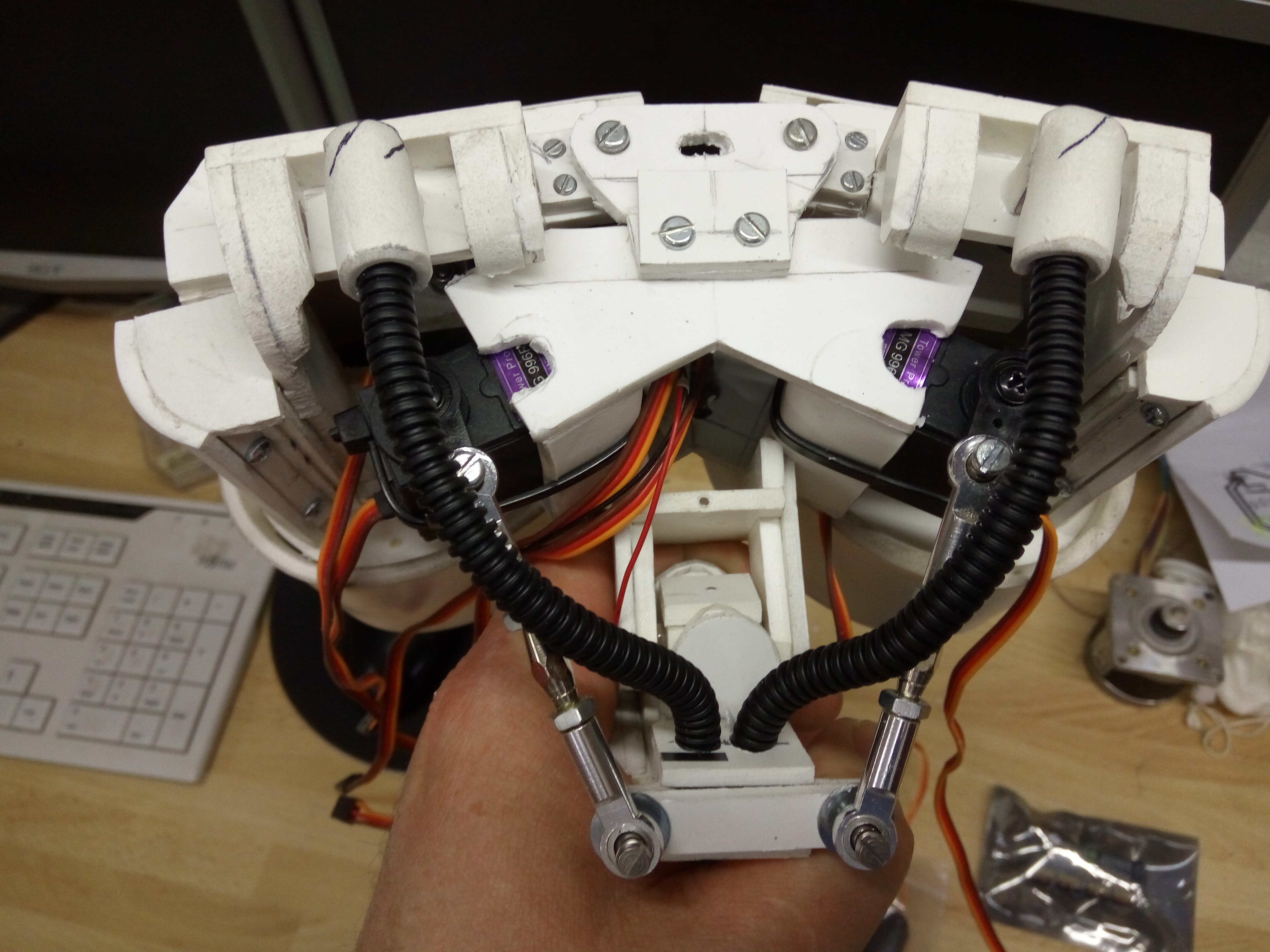
Der Kopf war leicht zu bauen aber der Hals hatte es in sich. Ich entschied mich für Bowdenzüge aus dem Modellbau.






Den richtige Look fand ich durch unterschiedliche Techniken mit Sprydosen-Farbe Sand und Leim.

Auch die Arme und Klappen wurden vollständig aus Forex geformt und geleimt. Und noch ein Bild von der mit liebe hergestellten Frontplatte.




Leider hat sich die Technologie mit den Bowdenzügen als unvorteilhaft erwiesen. Der Frust hatte dann eine lange Pause zur Folge. Die Pause hat sich so in die Länge gezogen, dass ich das Wall-E Projekt schon bald vergessen hätte das endete durch den Vorsatz wieder mehr zu basteln und wieder regelmässig die Werkstatt zu besuchen.
Als mich mein alter Kumpel Nikki besuchte und mir von seinem autonomen Roboter, den er gerne bauen wollte erzählte, hab ich ihm den Vorschlag gemacht mit mir zu basteln. Er meinte, dass mein unfertiger Wall-E die Ideale Grundlagen besässe um ihm seine Programmierkenntnisse zu schenken. Als studierter Programmierer hat mich sein Angebot umgehauen und ich brach in Jubel aus. Nun konnte ich endlich die altmodische RC Steuermethode vergssen und mit ihm an den neuen Möglichkeiten der modernen Mikrokontroller Technologie arbeiten.
Auf seine Empfehlung kauften wir uns ein Lattepanda mit Windowas 10 und integriertem Arduino auf dem er seine Software Umgebung aufsetzte.
In der Zwischenzeit hab ich neue Motivation gefunden den Kopf und vor allem den Hals zu redesignen.
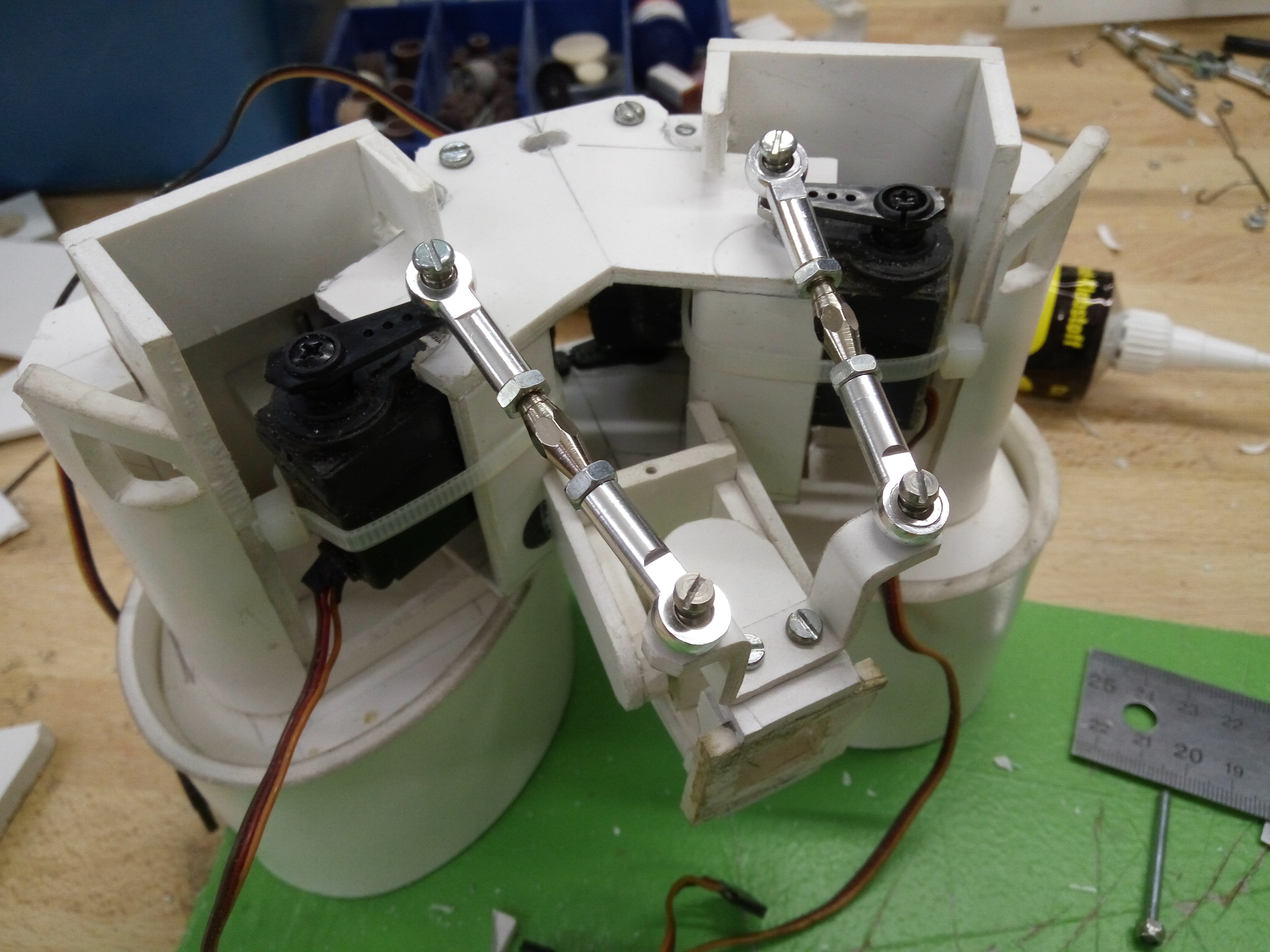
Im Kopf habe ich zwei Servo eingebaut um die Augen auf und ab zu bewegen und Zwei um den Kopf auf alle Seiten zu neigen.

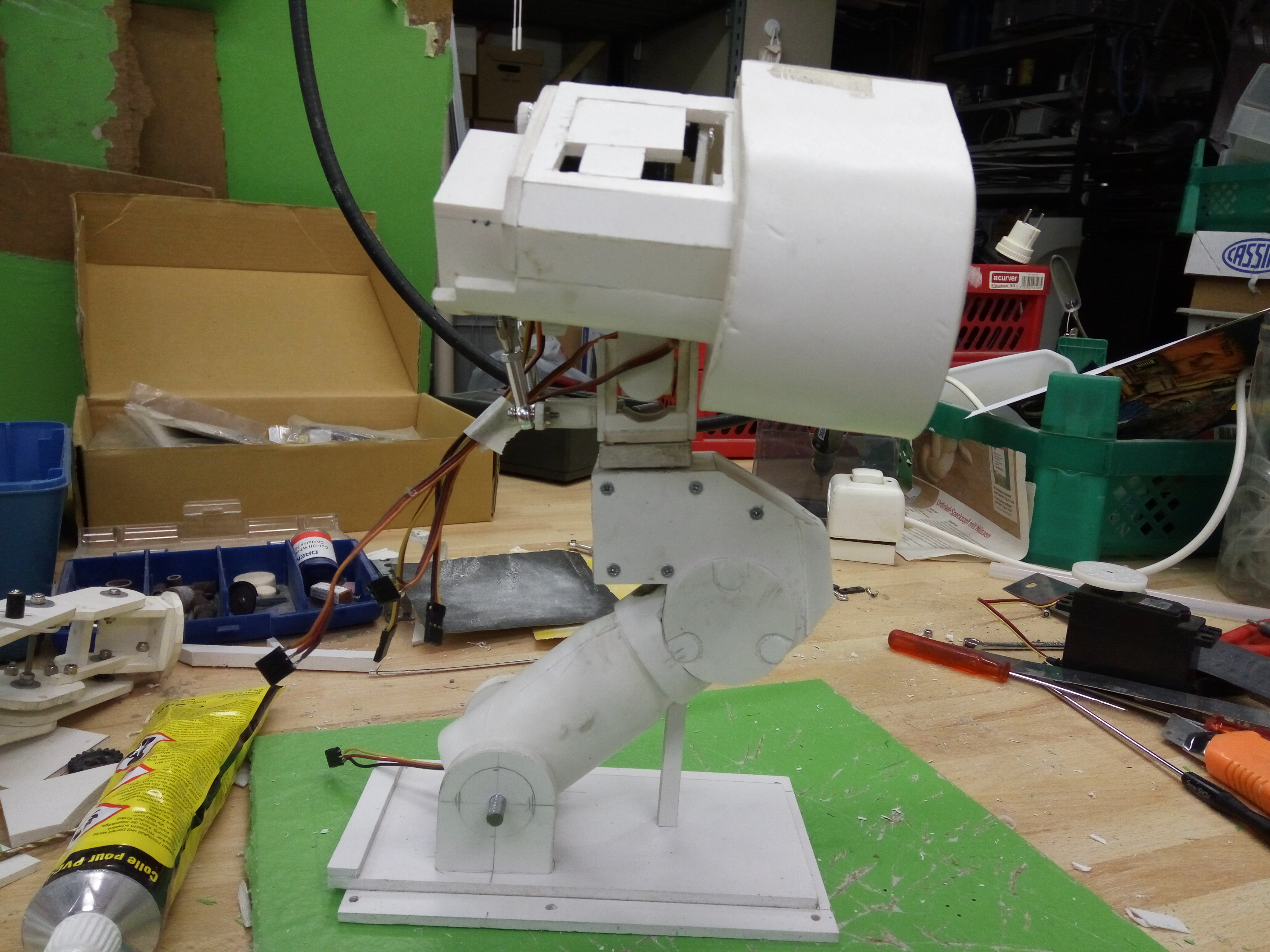




Da unser 3D Drucker in der Reparatur ist und ich schon mit Forex begonnen hatte, entschied ich mich so weiter zu machen.
Im Hals ist ein Servo um den Kopf zu schwenken und unter der Montageplatte des Halses befindet sich ein starker Servo um den Hals mit dem Kopf zu heben und zu senken.
Für die Augenbrauen verwende ich zwei kleine Servos von aliexpress für 1.20 $
Was soll man sagen... ist er nicht schnuckelig?
Ein weiterer Wunsch war der Einbau eines Lasers. Damit man aber einen Laser sehen kann, muss Nebel in der Luft liegen. Leider gibts das sehr selten. Desshalb musste der Wall-E den Nebel eben selber erzeugen. Cloud Chasing inspirierte mich mit einer einfachen Konstruktion die auch mit Akku funktioniert.
Nikki war auch überhaupt nicht untätig und hat die Grundlage der Software programmiert. Sie soll universell für alle Arten von Roboter funktionieren und beinhaltet geniale Ideen. Z.B. Erkennt die Software selbstständig, wenn ein Roboter eingeschaltet wird und verbindet sich gleich mit ihm. Das ganze funktioniert über W-LAN und soll über ein Windows 10 Tablet kontrolliert werden. In erster Linie soll er sich aber selber bewegen. Durch Ultraschall Sensoren soll er Distanz halten. Ein Mikrofon soll Befehle entgegen nehmen und eine, ev. Zwei Kammeras beobachten die Umgebung. Mit Kammeratracking kann Wall-E auch Personen und Objekte erkennen. Ob der LattePanda all diese Aufgaben meistern mag ist noch nicht klar. Eine Sprachsynthese erzeugt eine Stimme nahe dem Original.
Ob er mal über ein Neuronales Netzwerk eine KI bekommt, zeigt sich.
Wipp wipp
Wall-E lernt zu tanzen und hat eine Wippfunktion erhalten. V1 mit der original Aufhängung war zu unstabil. Deshalb habe ich ein Neues gebaut. Mit 5 mm Aluplatten. Jetzt ist er Bockhart.
Die Kabelrohre sind endlich eingetroffen und wurden gleich verlegt. Sieht echt lecker aus 🙂

Das Solar Charge Panel hat sich in der langen Pause angefangen zu wellen, deshalb muss ein Neues her. Mit dem Plotter hab ich die Folie ausgeschnitten. Gut die Schrift ist nicht so super-toll jedoch immer noch besser als ich gedacht hab. Auf ne CD Hülle geklebt und mit gelbem Papier hinterlegt sieht es dann doch ganz passabel aus.




Alles schön und Gut doch leider hat mich diese Variante als Display nicht überzeugt. Doch, jucheee! Aliexpress hat die perfekte Lösung. Das Nextion HMI LCD Touchscreen 2,4. Es hat genau die richtige Grösse und ist kinderleicht zu programmieren. Es besitzt sogar einen eigenen Rechner und kann ohne Microcontroller betrieben werden. In dieser ersten Version hab ich mit Photoshop die Sequenz der Bilder erstellt, ins Display geladen und hintereinander abgespielt. In einem nächsten Schritt wird die Sequenz über die Serielle Schnittstelle vom Arduino gesteuert. Es soll Akku Kapazität anzeigen und später ev. noch ein paar Gimmiks die über das Touchscreen gesteuert werden darstellen.
Das ist die Lösung meiner Träume 🙂
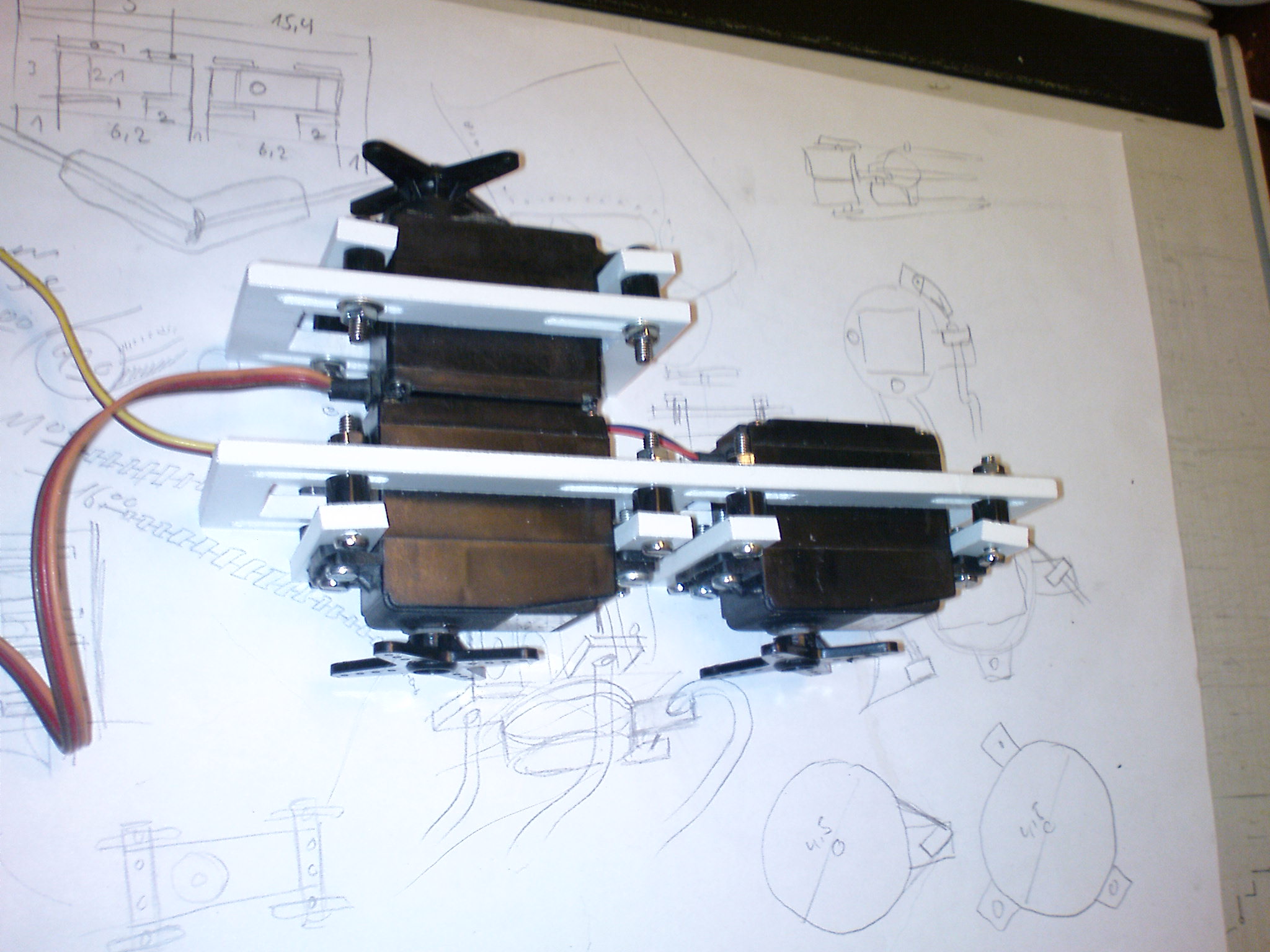
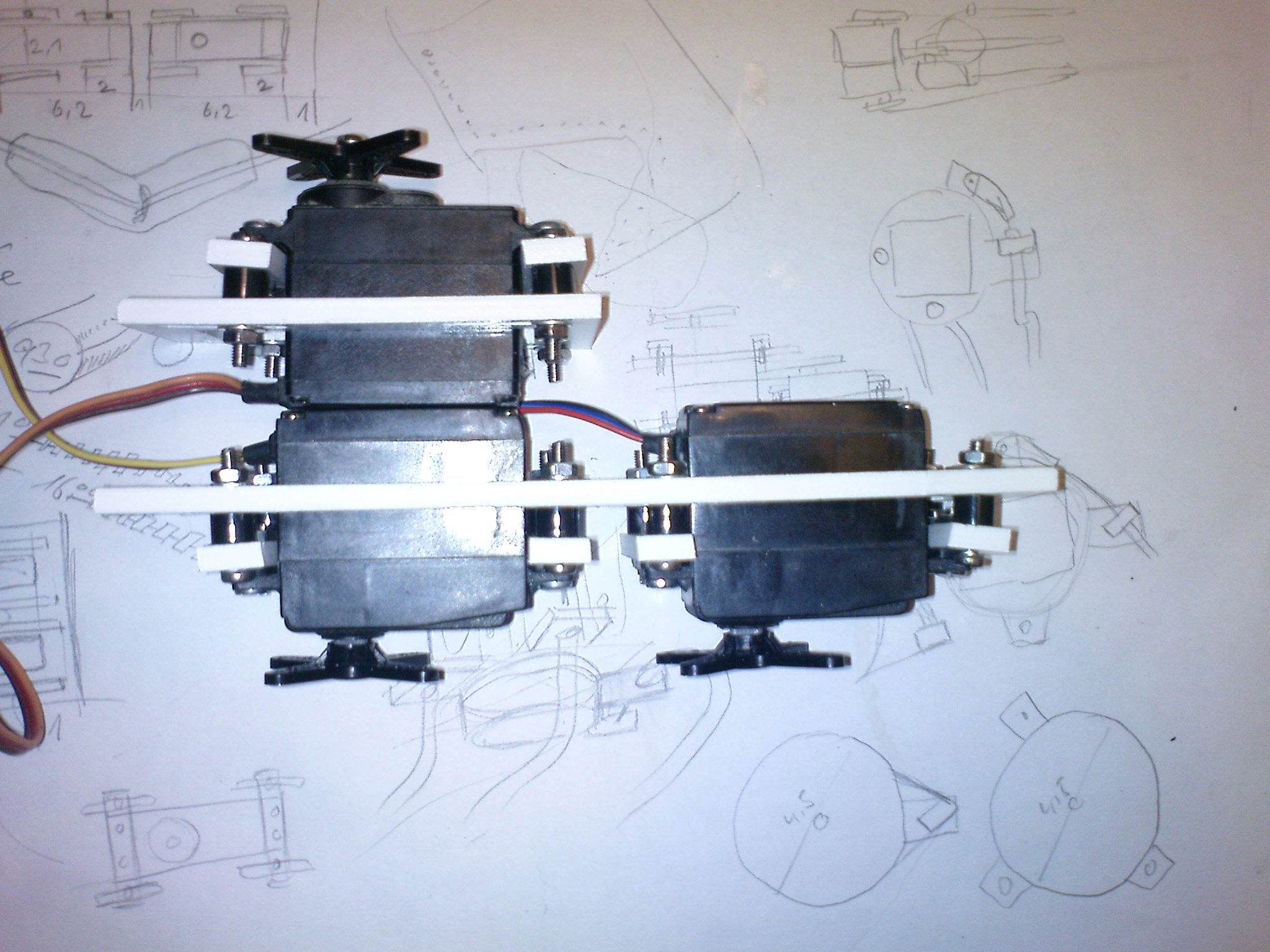
Wie sich alles so entwickelte kam das Bedürfnis auf die Arme zu bewegen. In einem ersten Schritt nur mal auf und ab. Dazu habe ich mir ein paar fette Servos besorgt und die über Winkelzahnräder angetrieben.
Beim ersten Test mit Nikkis Hardware und Programmierung hat sich ein neues Problem bemerkbar gemacht. Die mittlerweile 12 Servos benötigen beim Einschalten so viel Strom dass der Akku überlastet und sich sofort ausschaltet. Eine mögliche Lösung ist, die Servos Gruppenweise verzögert einzuschalten. Es wird sich zeigen.
Das Fahrwerk dreht.
Erste Tests mit der Software.
Leider gibt es noch einige Schwachstellen in der Mechanik. Es gibt immer was zu tun.
Nach vielen Problemen hat mich wieder mal die Motivation verlassen.
Zuerst habe ich gemerkt dass beim Antrieb ein Kunststoff Zahnrad gebrochen ist. Darauf hin habe ich mich entschieden neue Motoren zu kaufen. Im aliexpress habe ich Geniale mit Winkelgetriebe gefunden. Nach dem Einbau ist auch das Antriebsrad gebrochen. Erstaunlicherweise habe ich im aliexpress genau die Selben in Metall gefunden. In der Wartephase habe ich mit den Stormtrooper Helmen und dem Thron Light Cycle angefangen. Wall-E wird wohl noch etwas warten müssen. 😑
Sieben Jahre sind vergangen seit dem letzten Eintrag.
Nikki hat das Projekt verlassen und mich mit dem Late Panda und seiner Software alleine gelassen.
Nun habe ich den Dämpfer überwunden und versuche einen neuen Anfang, Auslöser war ein Kunde der mir die Löcher mit dem Gewinde in die Motorenachse schneiden konnte. Somit habe ich als erstes die Trails umgebaut. Aber zuerst musste ich den Staub entfernen der sich in den vielen Jahren angesammelt hatte.

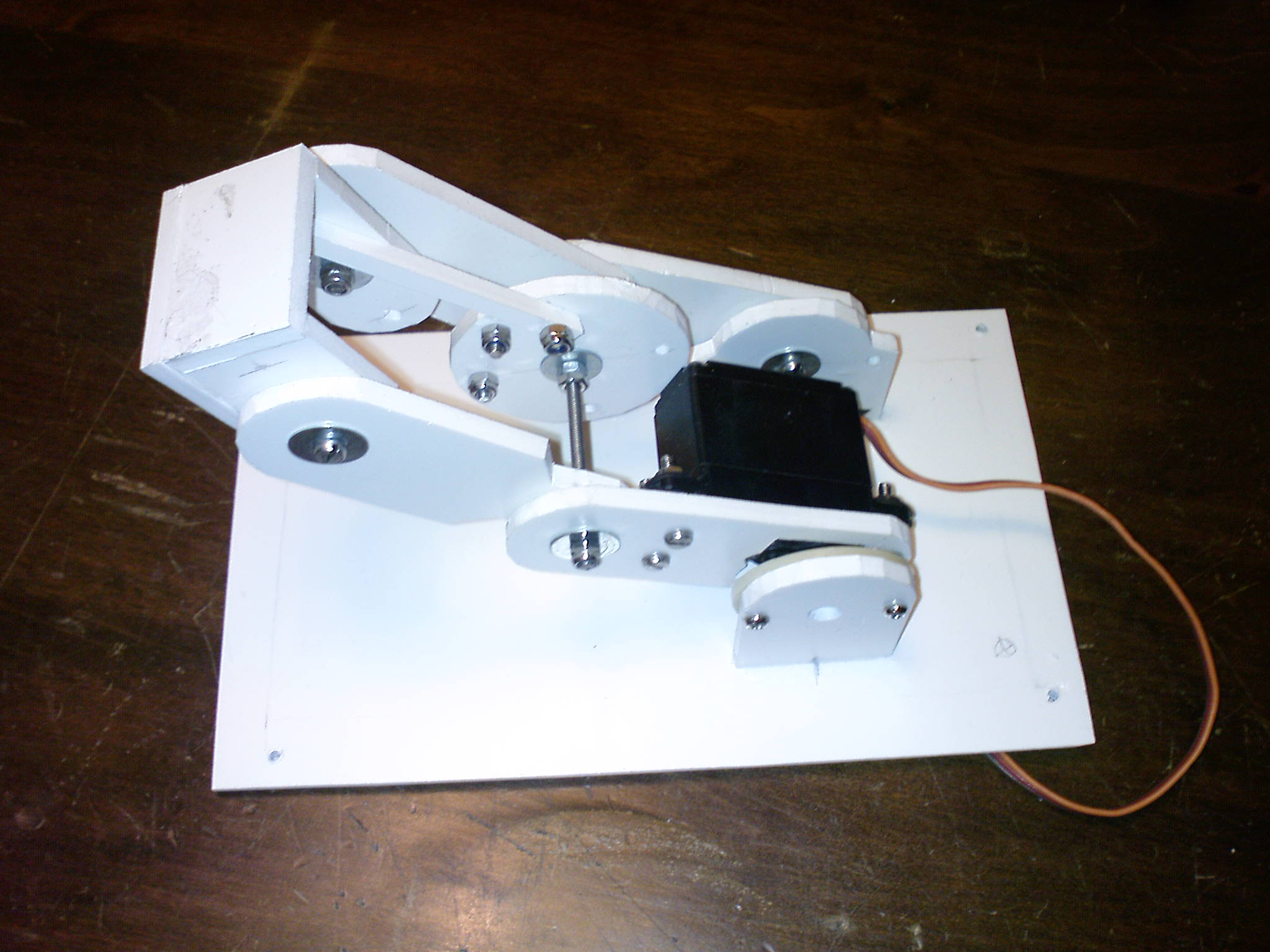
Antrieb der Arme
2017 habe ich schon angefangen mit der Armantriebskonstruktion. Die war aber nicht so zuverlässig und musste überabeitet werden. In der Zwischenzeit hat sich er 3D Drucker etabliert und ich habe mich im CAD eingearbeitet. So habe ich den alten Mechanismus übernommen und ihn verbessert und dann Ausgedruckt. Die Achsen habe ich am Drehbank gedreht. Für die gegenüberliegende Seite konnte ich die Daten einfach Spiegeln. Das ist sehr komfortabel.

Neue Steuerung
Ich möchte einen Automatikmodus, der den kleinen Roboter zeitweise bewegt, wenn er im Wohnzimmer steht. Ich möchte ihn aber auch fernsteuern können, vor allem zum Fahren. Dann wäre die Animatroniksoftware Bottango genau das Richtige. Auf jeden Fall müssen die hässlichen Ultraschallsensoren weg. Die sind mir schon lange ein Dorn im Auge.
Ich habe Bottango ja schon zu Testzwecken beim Roboterkopf verwendet und finde es immer besser. Das ist eine freie Software, die mit Arduino kompatibel ist. Man baut zuerst die Geometrie des Roboters mit Grundkörpern auf. Danach setzt man die Aktuatoren mit den Endpunkten ein. Dann kann man in der Timeline die Bewegungskurven setzen. Nach Belieben auch nach Audio einer Stimme oder Video mit den gefilmten Bewegungen. Das kann man immer in Echtzeit via USB direkt über den Arduino testen. Wenn die Bewegungen im Kasten sind, kann man sie exportieren und in den Arduino laden. Im Arduino kann man die gespeicherten Bewegungen abrufen oder über einen Zufallsgenerator abspielen. Durch eine Umschaltung ist dann die Steuerung über die Fernsteuerung möglich. Genau das, was ich brauche.

Bottango Testanimation
In der besagten Software haben ich eine erste Testanimation gemacht an der ich die Bewegungen ausprobieren möchte. Das sieht schon recht gut aus. Beim Animieren versuche ich mir vorzustellen wie die einzelnen Bewegungen zu einander ablaufen und bin danach meistens positiv überrascht weil es dann immer so lebendig wirkt.
Strategie der Funktionen
Nach langem Überlegen habe ich folgendes Konzept ausgebrütet.
Am Ladekabel Steuerung über Bottango:
- Permanente leichte Bewegungen der Servos
- ev. leichtes drehen mit dem Fahrwerk (bin ich mir noch nicht sicher)
- ev. Nebel und Laser (bin ich mir noch nicht sicher)
- ev. diskrete Stimme oder Geräusche (bin ich mir noch nicht sicher)
- Ladung der Akkus
Ladekabel nicht angeschlossen Steuerung über Xbox Controller:
- Fahrwerk
- Aller Servos
- Nebel und Laser
- Stimme oder Geräusche
Ausschalter:
- Natürlich keine Funktion aber Ladung der Akkus
ID's Aktuatoren
| Nummer | Aktuator | ID |
| 01 | Augenbraue Rechts | abr |
| 02 | Augenbraue Links | abl |
| 03 | Augen neigen Rechts | anr |
| 04 | Augen neigen Links | anl |
| 05 | Laser | las |
| 06 | Kopf neigen Rechts | knr |
| 07 | Kopf neigen Links | knl |
| 08 | Körper wippen | kpw |
| 09 | Arme neigen Rechts | anr |
| 10 | Arme neigen Links | anl |
| 11 | Fahrwerk Rechts | fwr |
| 12 | Fahrwerk Links | fwl |
| 13 | Rauch | rch |
| 14 | Auge einzeln L | ael |
| 15 | Auge einzeln R | aer |
Kopf Verkabelung
Heute ist der Tag der Wahrheit. Oder besser eine lange herausgeschobene Herausforderung, Die Verkabelung der Servos für den Kopf. Ziel war es alle Kabel in in die zwei Schläuche am Hinterkopf zu ziehen. Bevor ich die Schläuche gebogen hatte habe ich Einzugsdrähte gelegt. Beim Einziehen ist natürlich das Kabel Bündel vom Einzugsdraht gerissen. Mühsam musste ein neues einziehen. Schlussendlich habe ich es dann aber denn geschafft. Eine kleine Platine mit den Anschlüssen für die Servos konnte ich elegant hinter den Augen anbringen und an der Innenseite mit einem Stecker für den Anschluss am Board versehen.

Mainboard
Die Komponenten zur Steuerung musste ich aus Platzgründen auf zwei Ebenen anordnen. Sie passen durch die vordere Lucke in den Körper. Auf der unteren Ebene befindet sich der Arduino Mega 2560 und die zwei Motorentreiber. Die Antenne muss ich dann noch irgendwie anbringen. Auf der zweiten Ebene findet sich Platz für die Relaiskarte, der StepDown der für die 6 Volt der Servos zuständig ist, sowie der DFPlayer und der Verstärker. Der Platz für den Lautsprecher muss noch gefunden werden.

Nebelmaschine 2.0
Da die erste Version der Nebelmaschine abgefackelt ist musste eine neue mit Metallgehäuse her. Die Masse musste ich Platzgründen von der Alten übernehmen. Für die Zuführung des Glyzerins habe ich mich für eine kleine Glasflasche entschieden die die Flüssigkeit über ein gebogenes Röhrchen zu der Verbrennungsstelle führt. Als Belüftung habe ich zusätzlich ein dünne Röhrchen ins innere des Fläschchen geführt. Die Watte stopfe ich in des gebogen Röhrchen. Genug stark dass die Flüssigkeit nicht herausläuft. Als Isolator für den Heizdraht habe ich aus Gips einen Klotz gegossen. Die Gussform habe ich aus Plastilin gemacht.
Ein erster Test war recht erfolgreich. Zwar tropft das Glyzerin bei nicht gebrauch ein wenig raus und bei Aktivierung fliesst nicht genug nach sodass die Watte verbrennt. Ich versuche es noch mit feuerfester Watte. Mich hat die 550 Grad erstaunt.
Wenn es nicht reicht muss ich noch eine weitere Variante austüfteln.



Fortsetzung folgt…