1978, zwei Wochen vor meinem 12 Geburtstag lief der erste Krieg der Sterne Film mit R2-D2 in unseren Kinos. Mit unsäglicher Vorfreude hab ich meine Mutter überredet mit mir in die Vorstellung zu gehen. War der Schock um so grösser als die Kassiererin uns trotz Diskussionen und Flehen einfach nicht die Karten verkaufen wollte. Zum Glück lief der Film auch noch 14 Tage später und mein Traum ging in Erfüllung. Von da an existierte für mich eine neue Welt. Ich zeichnete und bastelte unentwegt Stormtroopers, Darth Vaders, und viele der fantastischen Roboter wie R2-D2.
Seit Kurzem fand ich zu meiner unendlichen Freude dank Michael Baddeley die 3D Daten zu einem lebensgrossen Artoo. Zur Seite
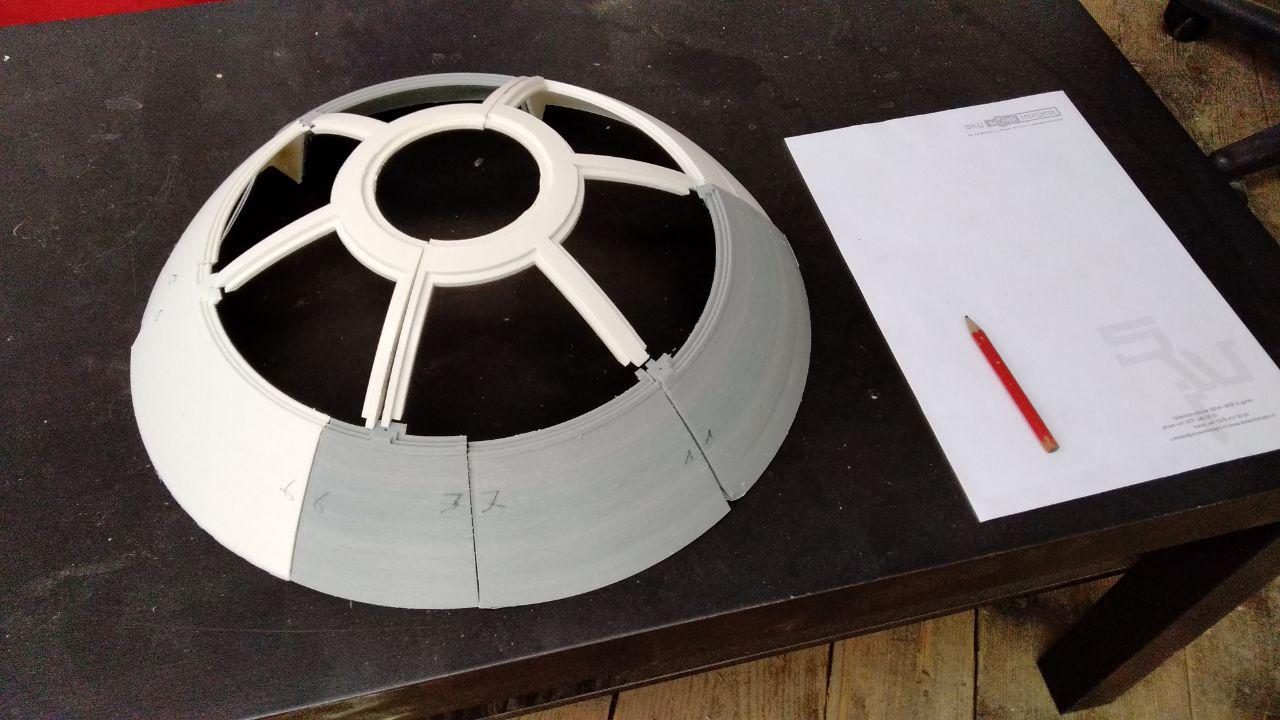
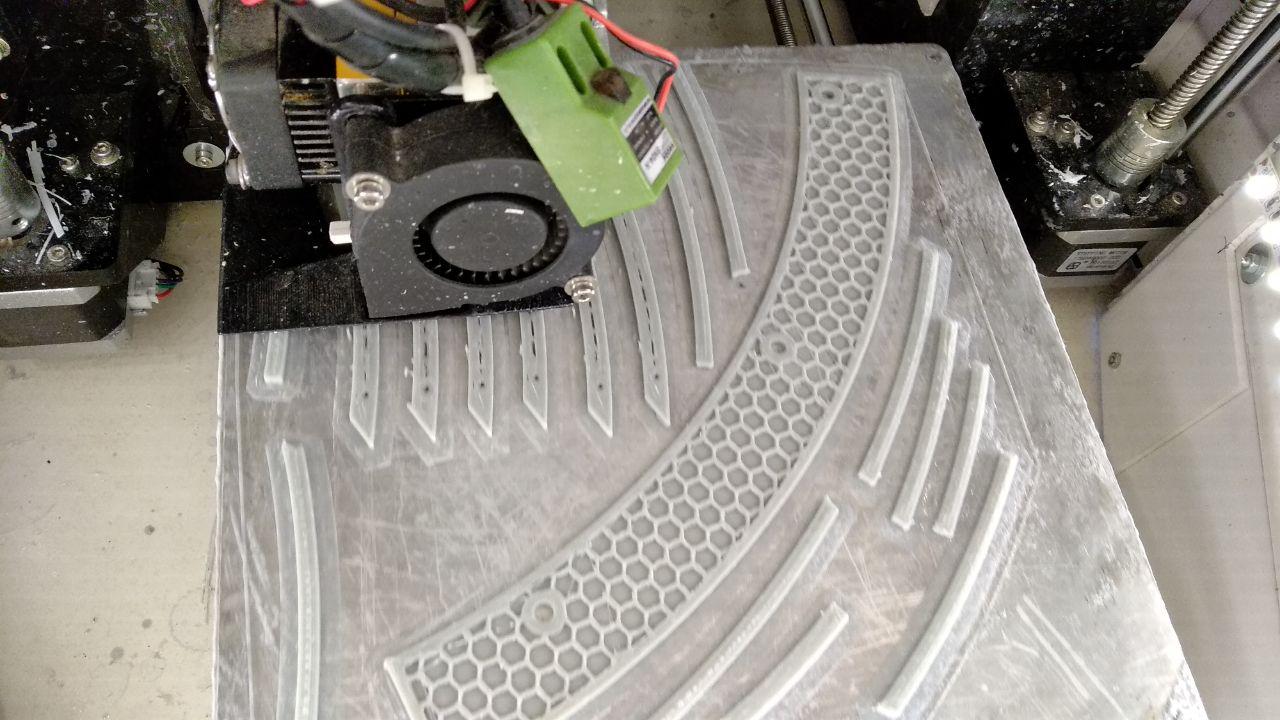
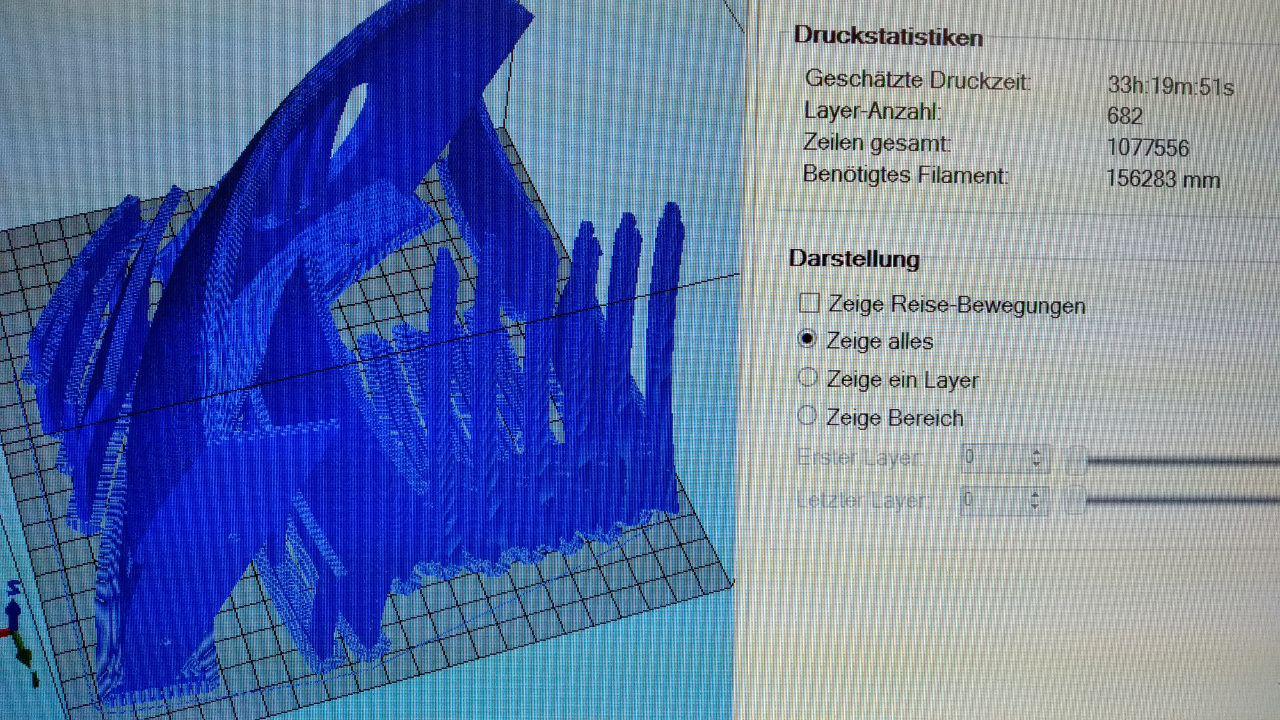
Seit zwei Monaten lauft nun der 3D Drucker auf hochtouren und zaubert aus Unmengen Plastikfilament die vielen Teile. Unterstütz von der genialen Seite astromech.net in der, der liebliche Droid bis ins Detail beschrieben und besprochen wird.
Hier die ersten Bilder

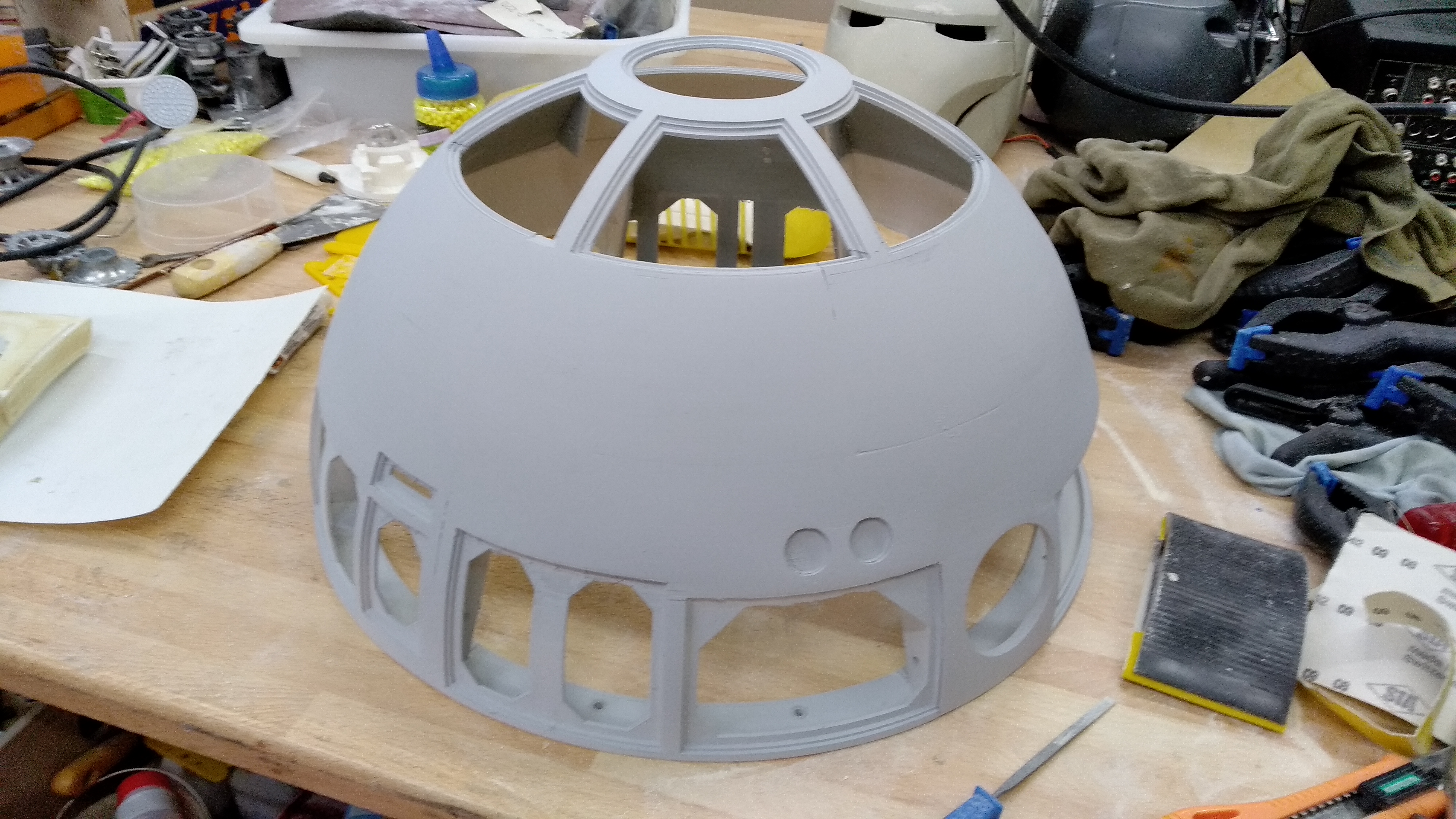
Und los geht's mit dem Spachteln und Schleifen 🙂
Körper. Jetzt bei 12 Kilo.

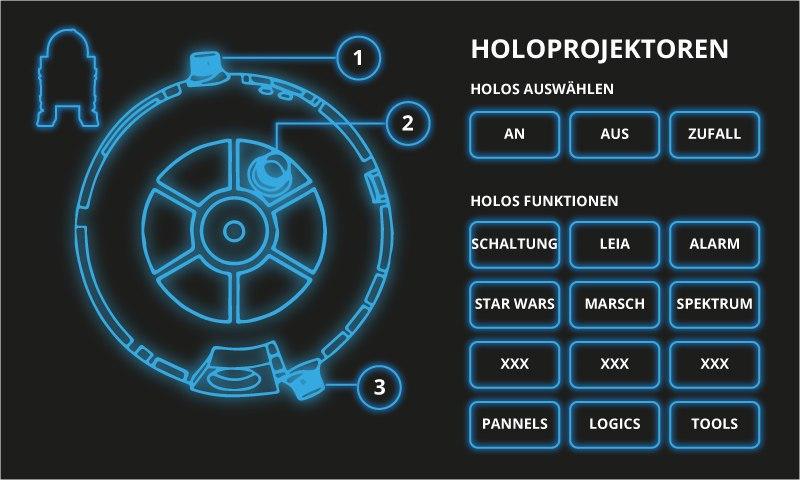
Holoprojektoren besitzt der R2 gleich drei Stück und wurde mit Dekolinsen bestückt.

Intermezzo
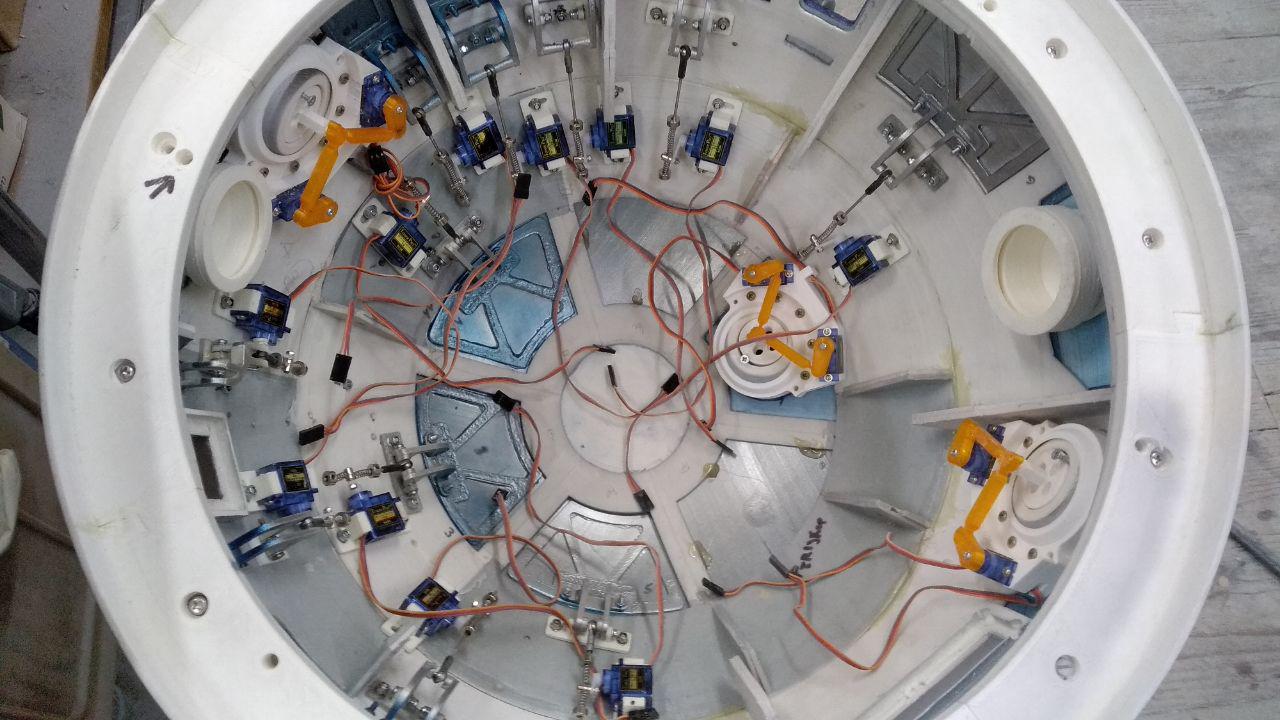
Dome Klappen
In vereinzelten Szenen kann R2 seine Klappen öffnen. Das wird natürlich auch umgesetzt. Mit Servos werden die Klappen über ein PWM Board an den Arduino angeschlossen. Pro PWM Board lassen sich 16 Servos steuern. Sollt das nicht reichen kann man mehrere PWM Boards in Serie schalten.





Schema
Schema für die Stomversorgung im Netz gefunden und bearbeitet. Scheint mir als die perfekte Lösung.

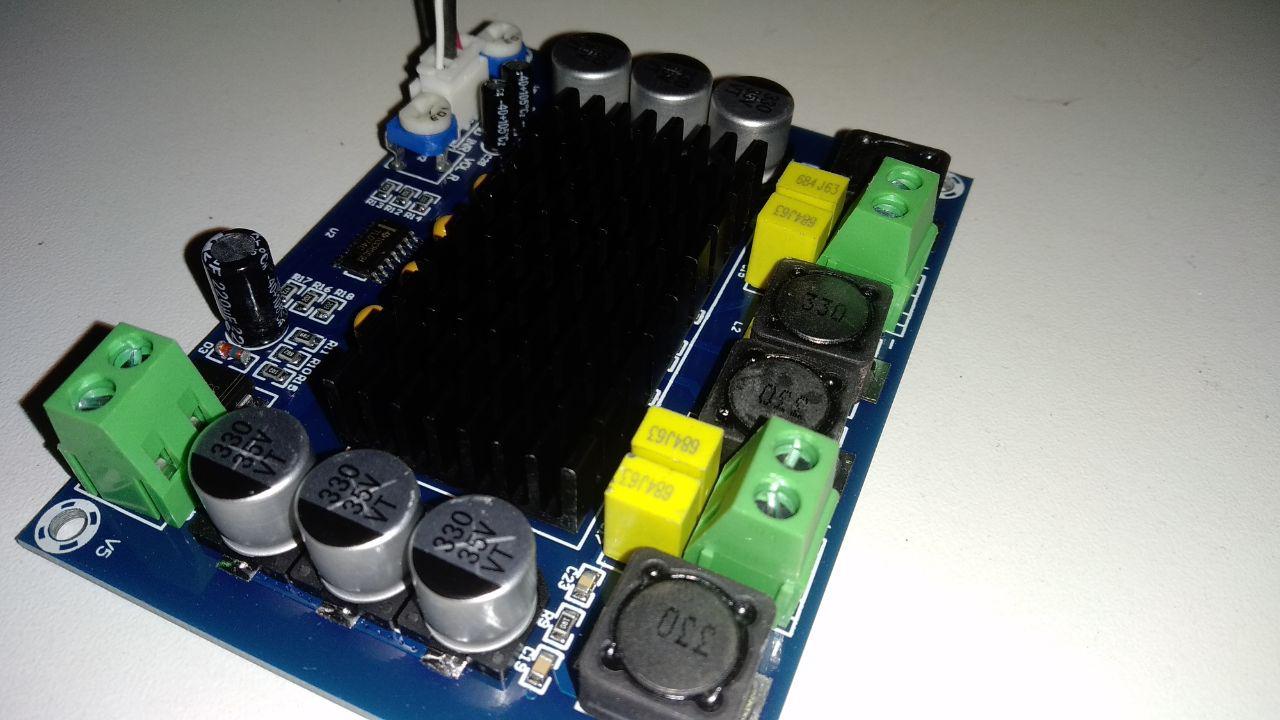
Soundboard
Von Aliexpress kommt diese kleine aber leistungsstarke Endstufe. Sie soll laut Angaben bei 24V 2 x 220 Watt bringen.
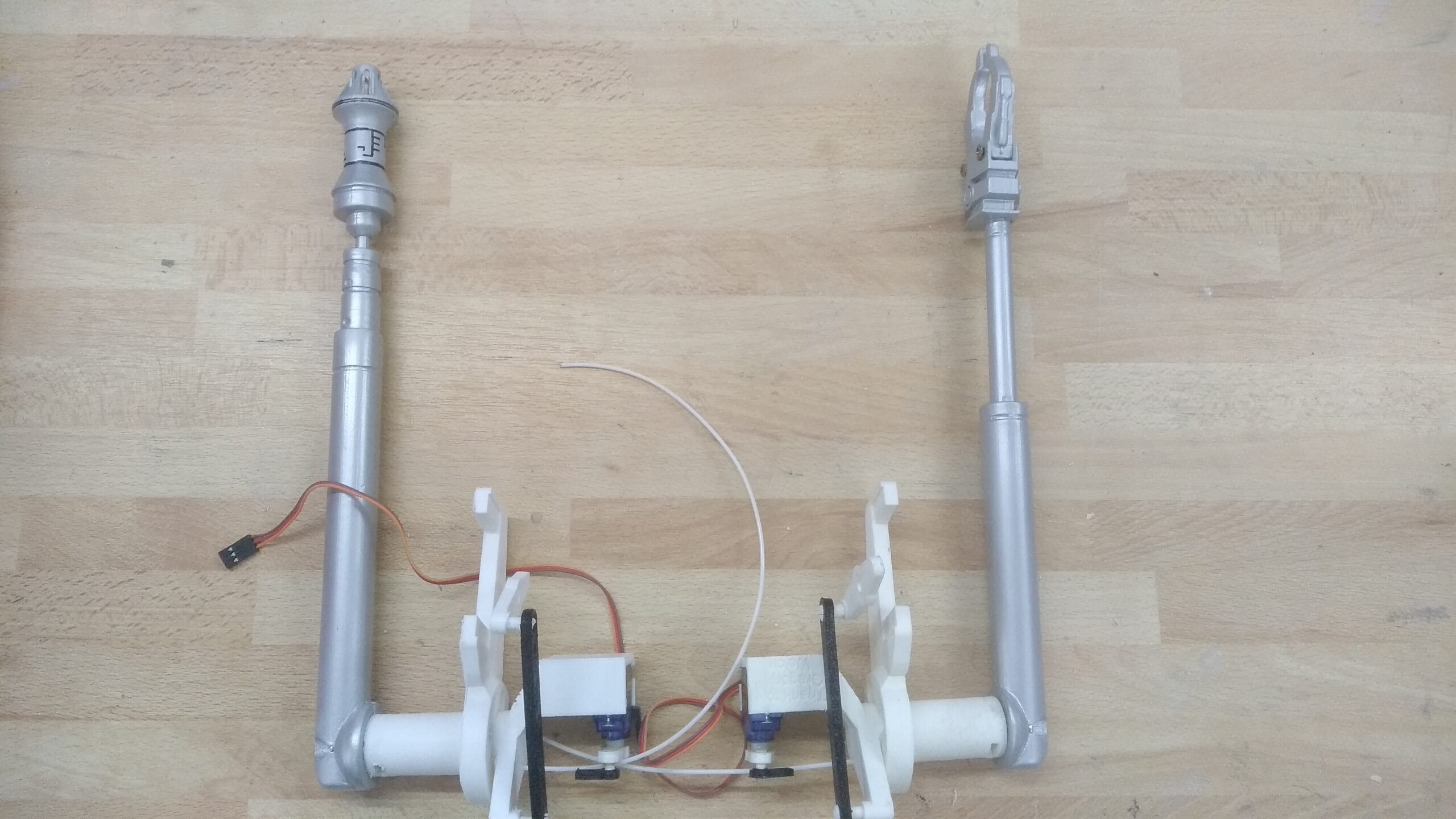
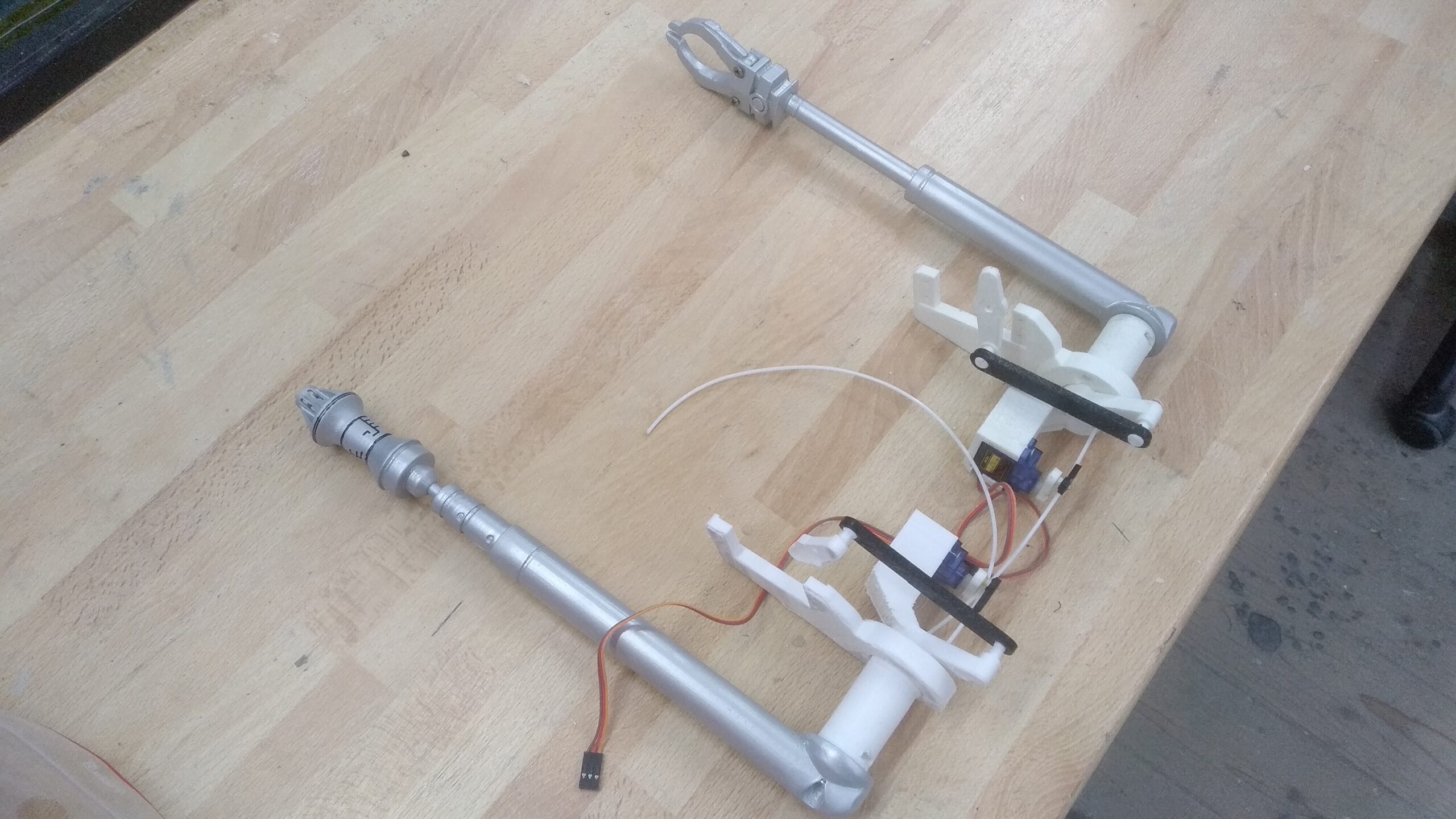
Periskop Test
In Thingiverse hab ich eine Periskop Mechanik gefunden. Nach dem Zusammenbau hab ich aber die Probleme dieser Konstruktion erkannt. Via Umlenkrollen wird über eine Schnur der Schaft nach oben gezogen. Dass das nicht über längere Zeit funktionieren kann erkennt man sehr schnell. Bin deshalb noch auf der Suche nach Alternative.
Nachtrag. Mittlerweile ist auf Thingiverse Link die rundum glücklich Lösung erschienen.
Freue mich schon es zu bauen. Leider muss es noch bis zum Frühling warten.
Teeces Logic Light
Nach ersten Schwierigkeiten läuft nun das Teeces Licht einwandfrei.
Achtung die LEDs können verkehrt eingebaut werden und leuchten doch. Jedoch nicht richtig. Ein nachträgliches änder ist fast nicht möglich. Ich habe eine neue Platine bestellt. Die Platinen findet man unter Link.
Radar Auge
R2 bekommt sein Gesicht. Es ist wohl einer der wichtigsten Merkmale des kleinen Droiden. Die Linse wird aus einer von innen lackierten Christbaum Kugel hergestellt.

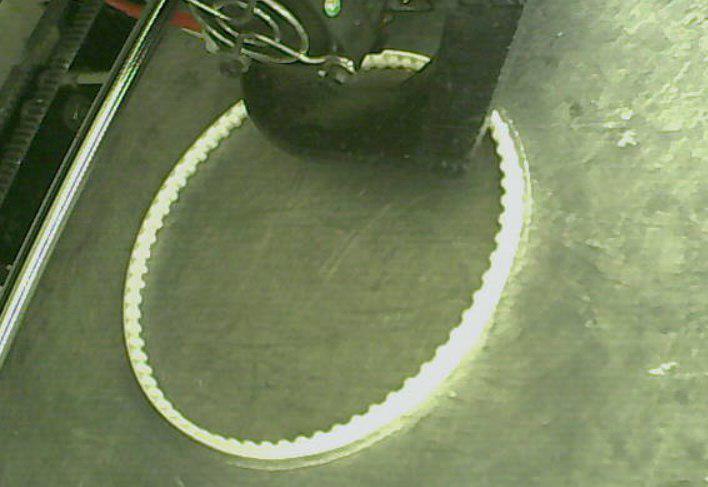
Ninjaflex Gummi Print für den Antrieb
Der Riemen wird aus druckbarem Gummi geschaffen.
Der Antrieb des ersten Fusses wird gedruckt und zusammen gebaut. Als Motor ist einen Scooter Motor für 24 Volt mit 120 Watt für jeden Fuss geplant.
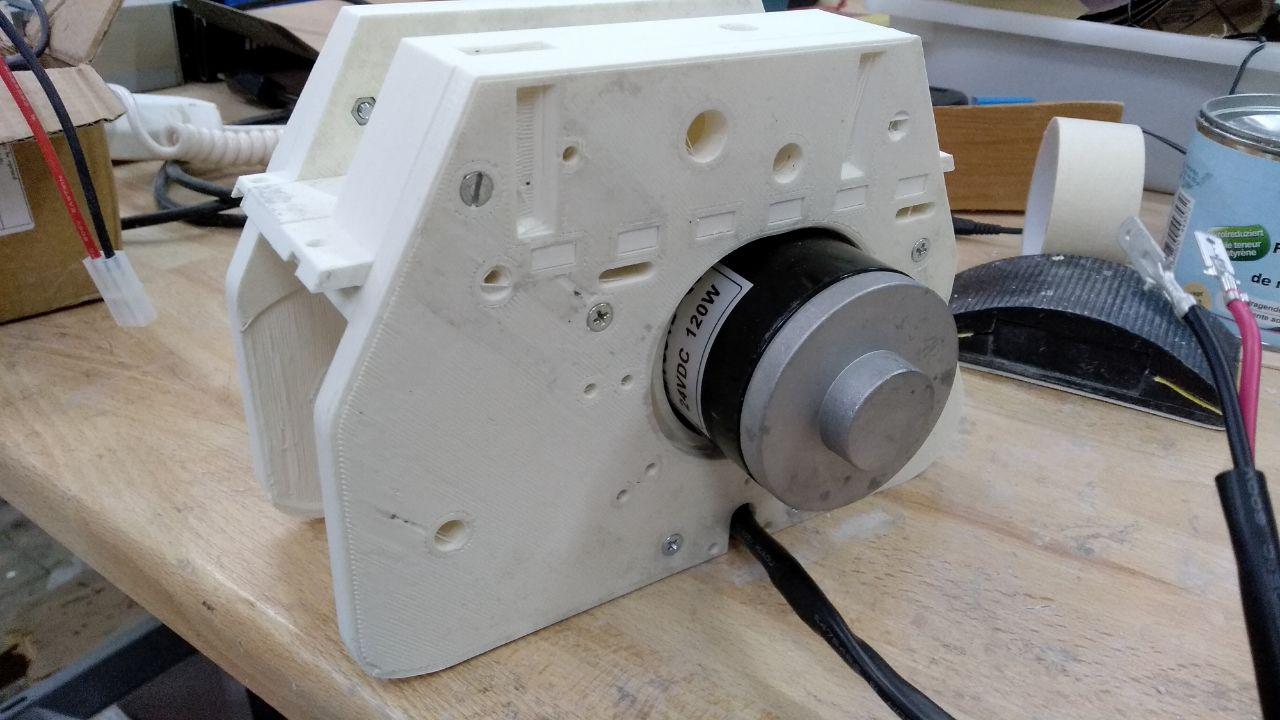
Der geht ab wie eine Rakete!!!
Grundiert
Ich sag einfach nur Wow!

Dome Antrieb
Yeah er dreht!
Funk Test
Ziel ist es die Fernsteuerung mit dem NRF24L01 Modul zu bauen. Es überträgt Daten auf dem 2,4 GHz Band und soll auf freiem Feld an die 700 Meter senden resp. empfangen. Dieser einfache Test ist unter Link zu finden.
Lackierung
Da die Schweizer Dupli Color Sprühfarben nicht den Werten der US Kollegen von astromech.net entsprechen, hab ich mich für die folgenden Werte entschieden.
ACHTUNG Diese Angaben gelten nur für Schweizer Dupli Color Farben!
Spachtel:
Presto Füll- bez. Fein-Spachtel
(Sehr gut jedoch CHF 19.90 pro Dose)
Blau:
Dupli Color Auto Color 20-0800 Art.Nr.: 678240
Dupli Color Lackstift 20-0800
(Sehr schwer erhältlich)
Silber:
Dupli Color Auto Color 10-0120 Art.Nr.: 672149
Dupli Color Lackstift 10-0120
Weiss:
Dupli Color Aerosol Art RAL 9016 Art.Nr.: 741449
(Mit CHF 11.95 günstig jedoch schlechte Deckkraft)
Lack:
Dupli Color 2-Schicht Klarlack
(Bin mir nicht ganz sicher ob es den überhaupt braucht)
Nach jedem Anstrich jeder Farbe 2 Stunden zum Trocknen zwischen den Anstrichen und mindestens 1 Tag zwischen den Farben, damit er zum Schleifen trocknen kann.
Sicher stellen, dass jedes Teil vor dem Schleifen auf Passgenauigkeit stimmt und etwas Platz für Farbe geben.

Dome Auge
Die Lackierarbeiten gehen gut voran. Wobei es noch viel zu schleifen gibt.



Bein
Beim ersten Bein sieht man schon wies so kommt.

Gedrucktes Filament: 20.7 Kilogramm.
Lackierarbeiten




Das erste mal auf eigenen Beinen
Mein Herz springt! Der R2 steht das erste mal auf seinen eigenen Beinen. Was für ein Bild!!!

Wie man sieht gibt es noch viel zu tun. Bis ende November soll sein Aussehen vollendet sein. Dann muss er 5 Monate warten bis ihm das Innenleben eingebaut wird. Ich habe schon einige Vorstellung was es an Programmierarbeiten braucht. Das Netz bietet ja viele Infos und einen Haufen an Code an. Das Rad muss ja nicht neu erfunden werden doch soll es meinen Wünschen entsprechen. Ob dann alles zusammen passt stellt sich noch raus.
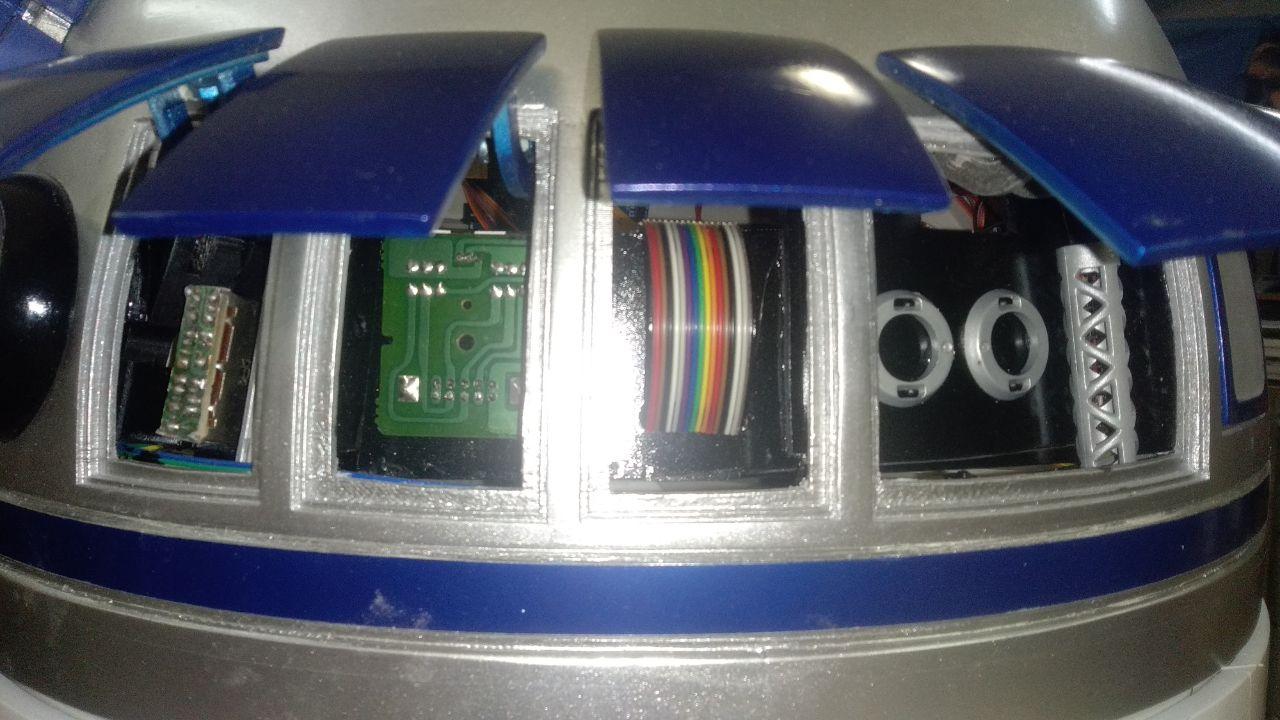
Ausbau des Doms
Die Klappen, die Holoprojektoren und der Rest ist im Dome eingebaut.
Ein paar Schrauben noch
Vom Äusseren ist das Ziel nun erreicht. Die Platinen für das Data Panel muss noch angepasst werden dann darf er das erste mal das Wohnzimmer schmücken.

Momentanes Totalgewicht ist schwer einzuschätzen. Ich kann ich grade so 10 cm über den Boden heben. Also ganz grob geschätzt an die 40 Kilo. Mit den 3 Bleiakus, Elektronik und Verkabelung ist es dann wohl unrealistisch ihn zu heben.
Winterpause in Spanien
In den fünf Monaten Winter- und 2 Monaten Corona- Pause war ich nicht untätig und hab mich um die Elektronik gekümmert. Ich musste viel über die Datenkommunikation zwischen den Arduinos lernen.
Fernstuerung
Die Fernsteuerung besteht aus einem Nextion Touchscreen und einem Joystick. Die Signale gehen durch den Arduino auf das NRF24L01 Funkmodul.
Auf der R2 Seite werden die Daten über das NRF24L01 Modul empfangen und via Arduino Mega verteilt.
Dank eines Joysticks welcher sich auch drehen lässt, kann auf den Knüppel verzichtet werden. Es bleibt also nur noch das Display und der kleine Dome-Joystick.
Hier gehts zur finalen Version
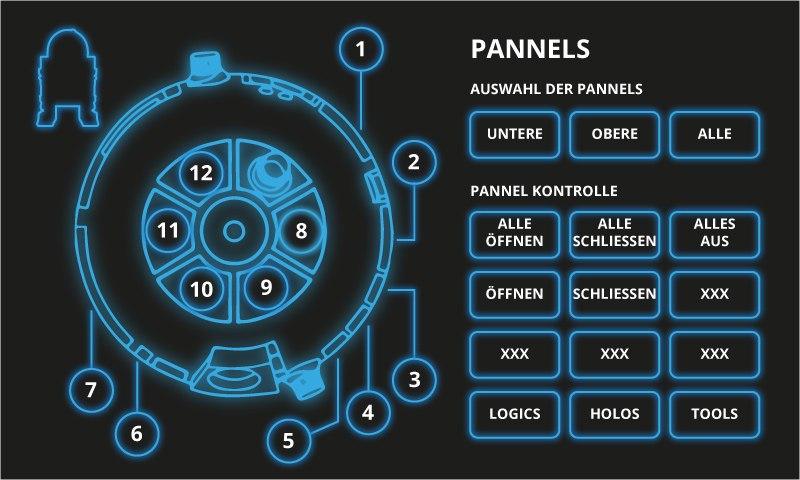
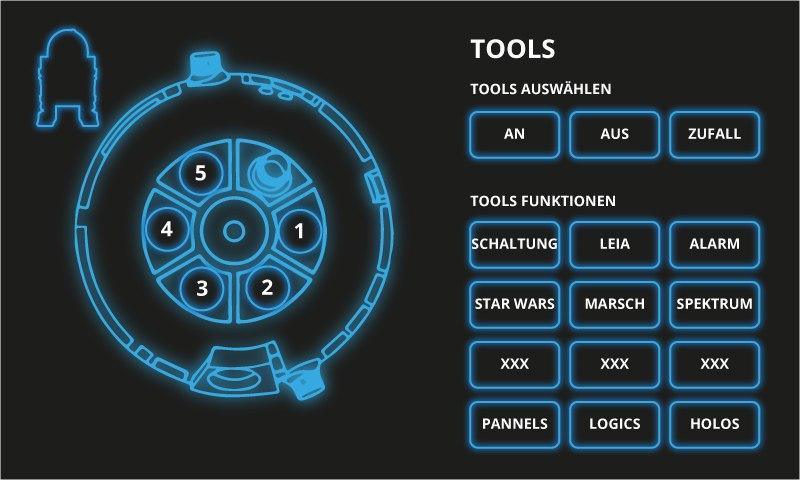
Display Layout
Inspiriert von Marcduino.


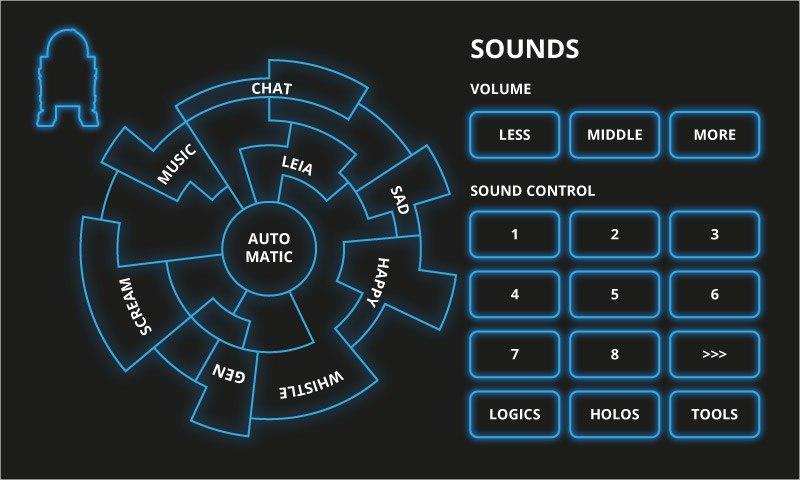
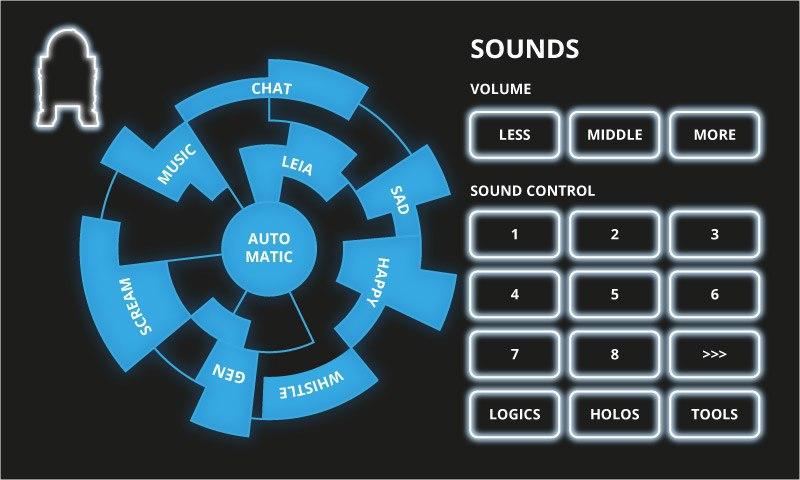
Display Funktionstest
Die Nextion Dispays haben den Vorteil, dass sie einen eigenen Prozessor integriert haben mit welchem das Display Grafiken verwalten aber auch kleine Programme ausführen kann. Programmiert wird es über eine eigene PC Software. Für mich genau das richtige.
In diesem Video sieht man einen Navigationstest.
Kabelgewirr
Intermezzo 2
Magic Panel Test
Im Film kann das Magic Panel nur rot aufleuchten. Da ich mir aber vor einiger Zeit ein RGB LED Arduino Shild gekauft hab und noch nirgends brauchen konnte entschloss ich mich es als Magic Panel zu benutzen. Ich wollte einige Muster abspielen. Z.B. eine art Lava Effekt. Das zu programmieren würde aber den Rahmen sprengen. Im Netz habe ich die Software Jinx gefunden mit der komplexe Visualisierungen für LED Displays mittel einer grafischer Oberfläche erstellt und gemixt werden kann. Also ein VJ Tool für LEDs. Das Muster wird auf eine SD Karte gespeichert und via Kartenleser in den Arduino geladen. Der steuert das Display. Die Idee basiert auf diesem Video. Die Kunst lag daran diese Effekte von der Fernsteuerung aus zu starten.
Sound Test
Alle R2-D2 Sounds sind auf Astromech zu finden. Sie werden auf eine SD Karte gespeichert und via Soundplayer abgespielt. Da gibt es viele Möglichkeiten. Ich hab mich für ein Produkt entschieden das ich hier nicht empfehlen möchte. Ich werde sie durch den DFPlayer ersetzen.
Das Spanien Abenteuer ist beendet
Zurück in der trauten Werkstatt
Dome Mechanik
Matt Zwar stellt auf Thingiverse die erste brauchbare Mechanik mit sage und schreibe fünf Liften für Periskop, Life Scanner, Laserschwert, Zapper und Bad Motivator zu Verfügung. Link
Die Hebelfunktion wird mit günstigen Motoren betrieben und die restlichen Funktionen mit G90 Servos. Für die Elektronik gibt es eine Halterung.
Periskop
Für die Schaltung der Beleuchtung habe ich einen Arduino Nano verwendet. Die Herausforderung war der Kampf mit dem Platz.
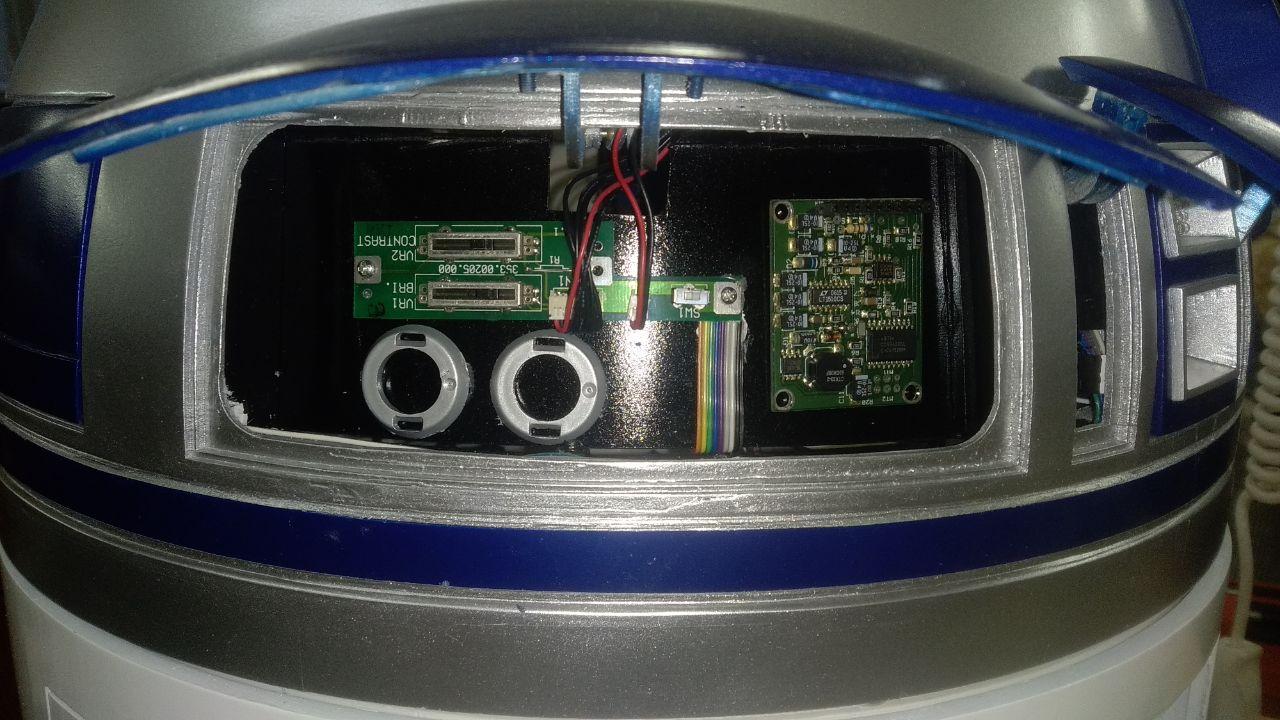
Data Panel
Auf dem Data Panel befindet sich ein Arduino Nano an seinen Grenzen. Er steuert eine UV Anzeige, 12 GRG LEDs und eine Hand voll LEDs.
[envira-gallery id="1091"]


Nachtrag: Grössere Widerstände lassen die hellen weissen LEDs schwächer leuchten.
Ladestation Anzeige
In "In die Rückkehr der Jedi Ritter" wird R2 an eine Ledestation angeschlossen. Anhand der Filmsequenzen und der R2 Gemeinde hab ich die LED Anzeige gebaut. Hier kommt der integrierte Baustein MAX7219 ins Spiel. Er wird über eine serielle SPI-Schnittstelle angesteuert und kann bis zu 64 LED einzeln ansteuern.
Die drei rot, gelb und grünen LEDs zeigen die Akkuspannung an.
Life Scanner & Periscope - die Zweite
Der weiter oben gescheiterte Versuch scheint nun dank Matt Zwart in der zweiten Version zu funktionieren. Die zwei LEDs beim Life Scanner werden durch eine simple Monoflop Kippschaltung zum blinken gebracht.
Ha ha! Der Zapper sieht super aus!
Greifer und Interface - Arm
Die beiden Arme sind gedruckt und angemalt. Mit einem Servo wird über ein Stück Nylon Filament das Tool gesteuert.
Body
Innenansicht von hinten nach vorne.

Die Teeces Lichter leuchten für R2
Im Dome
Innenpanorama

Batterie
3x 12 Volt und 9Ah. 2x in Serie für die Motoren und die Dritte für die Elektronik.

Panels
Hier war künstlerische Freiheit gefragt.
Hier noch ein paar Bilder von den Inlays.

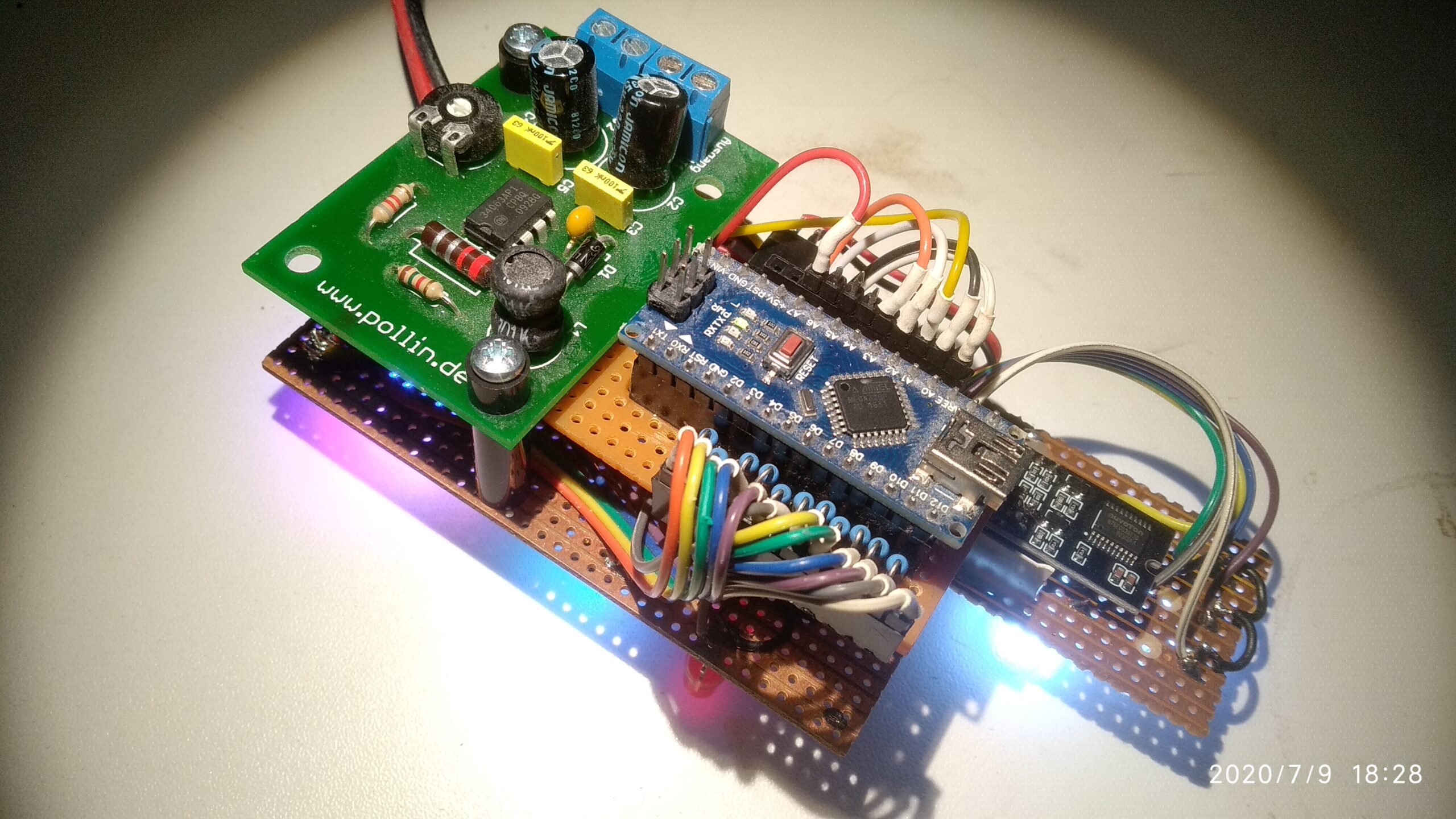
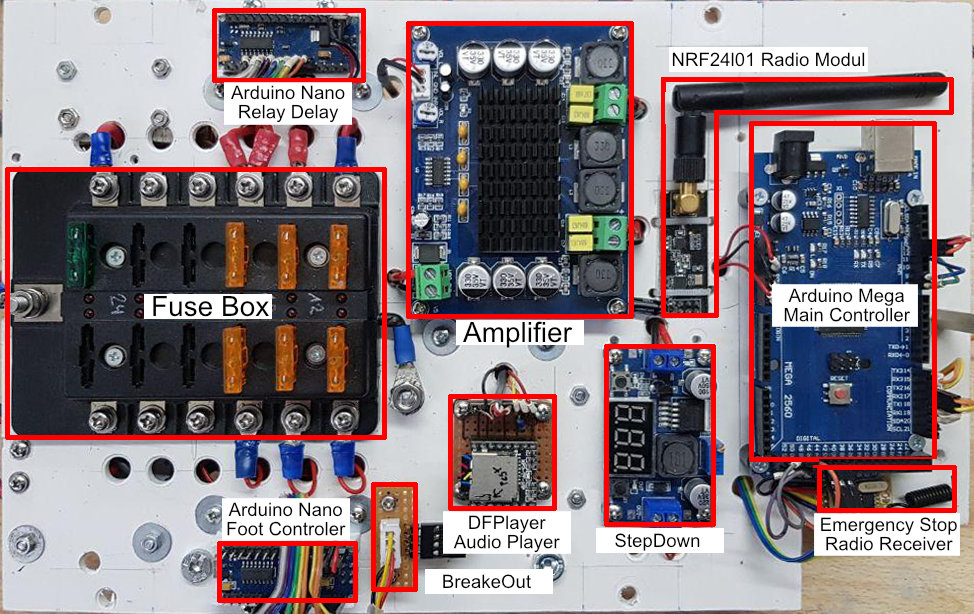
Mainboard
Endlich, nach unzähligen Stunden ist das Mainboard fertig geworden. Ich hoffe es. Nun ist es bereit für den Einbau. Um es besser zu verstehen habe ich die einzelnen Komponenten markiert.
Frontseite
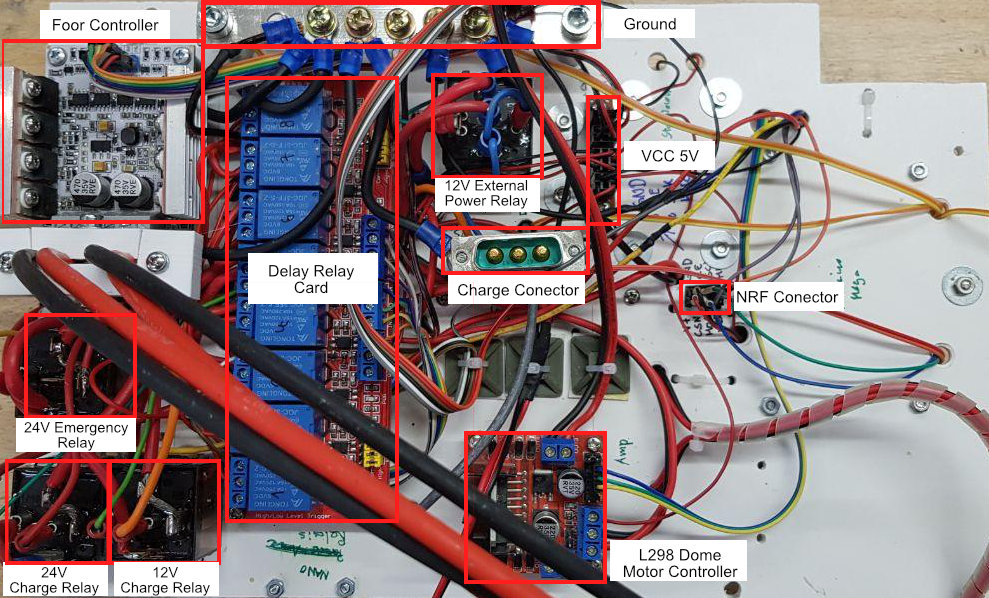
Rückseite
Optisch noch ein Kabelsalat. Für Kosmetik ist dann noch Zeit.
Fernsteuerung
Nun hab ich das Gehäuse für die Fernbedienung in der ersten Version fertiggestellt. Leider ist das ganze noch etwas instabil und bedarf einer Überarbeitung welche etwas stabiler konstruiert ist.




Finale der Fernsteuerung
Nun bin ich glücklich mit der Fernbedienung. Sie ist etwas kleiner, stabiler und sieht toll aus.
Ich hatte noch einige Schlüsselschalter an Lager die ich vor 30 Jahren cool fand und dann doch nicht einmal gebrauchen konnte. Der Not-Aus Schalter ist ein umgebauter Wii Nunchuk an einem kleinen Schwanenhals.
Die Lackierung des Doms ist mir noch etwas auf dem Magen gelegen. Hab dann eine Vinyl-Beschriftungsfolie mit dem Heissluftfön über den silbrig grundierten Dome gespannt, die blauen Klappen ausgeschnitten und ihn lackiert. Das klingt jetzt so einfach. So richtig gut hat es aber nicht funktioniert. Die Folie hat sich nur mit grösster Mühe so weit verziehen lassen, dass es am unteren Ende dann doch Falten gegeben hatte. Schon beim Ausschneiden merkte ich, dass sie sich nicht rückstandsfrei ablösen liess. Nach dem Lackieren hat sich die Folie etwas aufgeweicht und wurde wie Gummi. An grösseren Flächen fast nicht mehr abzulösen an Kleineren hat sie sich gewellt. Das Resultat war, wie zu erwarten nicht so toll. Mit Pinsel konnte ich das schlimmste ausgleichen. Dank der schönen Farben und des coolen Star Wars Designs sieht sie dennoch recht schön aus. Ob sie funktioniert wird sich zeigen. Das Display leuchtet auf jeden Fall.








Jetzt geht es an die Programmierung.
Body Panels
Weg des Signals:
Sender
Nextion Display / Ardiono Nano / NRF24 Funksender
Empfänger
NRF24 Funkempfänger / Arduino Mega / Arduino Nano / PCA9685 PWM Borad / Servos
Dome drehen
Ein wichtiger Schritt ist vollzogen. Die Kommunikation zwischen Körper und Dome. Dazwischen liegt ja der Schleifring und der schein sehr gut zu funktionieren.
Weg des Signals:
Sender
Joystick / Ardiono Nano / NRF24 Funksender
Empfänger
NRF24 Funkempfänger / Arduino Mega / L298N / Getriebemotor
In der Zwischenzeit hat der Motortreiber den Geist ausgegeben. Montagsproduktion?
Dome Panels
Wiedermal ein kleine Update meinerseits.
Schon ganz selbstverständlich hab ich mir beim Bau wieder einige Fehler und Hürden eingebaut. Wär ja nicht lustig wenn nicht. Geduldig sind auch die überwunden worden.
Um mal eine Auszeit vom Programmieren zu nehmen hab ich mal wieder zwei andere Projekte.
Zum T-800 Schädel , C-3PO, Grosse Uhr, UV Belichtung, Scout Trooper Helm und Tisch Bandschleifmaschine
Magnetstecker
Zwischen Dome und Body gibt es eine Verbindung bestehend aus Speisung und Datenkommunikation. Ein Stecker vergisst man gerne und reist ihn raus. Auch das Einstecken ist ein Gefummel.
Ein Magnetstecker schafft Abhilfe. Er ist verpolungssicher, löst sich problemlos und findet seinen Weg zur Kupplung selbstständig.






Fortsetzung folgt...